Is point cloud viewing obsolete?
3D laser scanning was invented in the 1960s and started to be used for design and engineering in the 1990s. Since the beginning, the discrete nature of the laser scanning technology has dictated how the resulting 3D data would be presented to the user. Therefore, viewing your as-built conditions as a point cloud has become the norm. But our world is made of surfaces, not 3D points! The scanning sensor should not dictate the way we view the captured information. Viewing and consuming a point cloud is not an easy task. Seeing through the dots, this type of data is difficult to interpret and navigate by non-experts, and tedious for experts. The same applies to many different use cases: don’t try to understand ultrasound or MRI data if you don’t have a few years’ experience in medical imaging!
With the advent of laser scanning becoming mainstream due to recent advances in static and mobile scanners, drone scanning and SLAM technologies, an optimized solution is needed. Now is the time to democratize the access and consumption of such trustful data, but this is not possible with point cloud viewing.
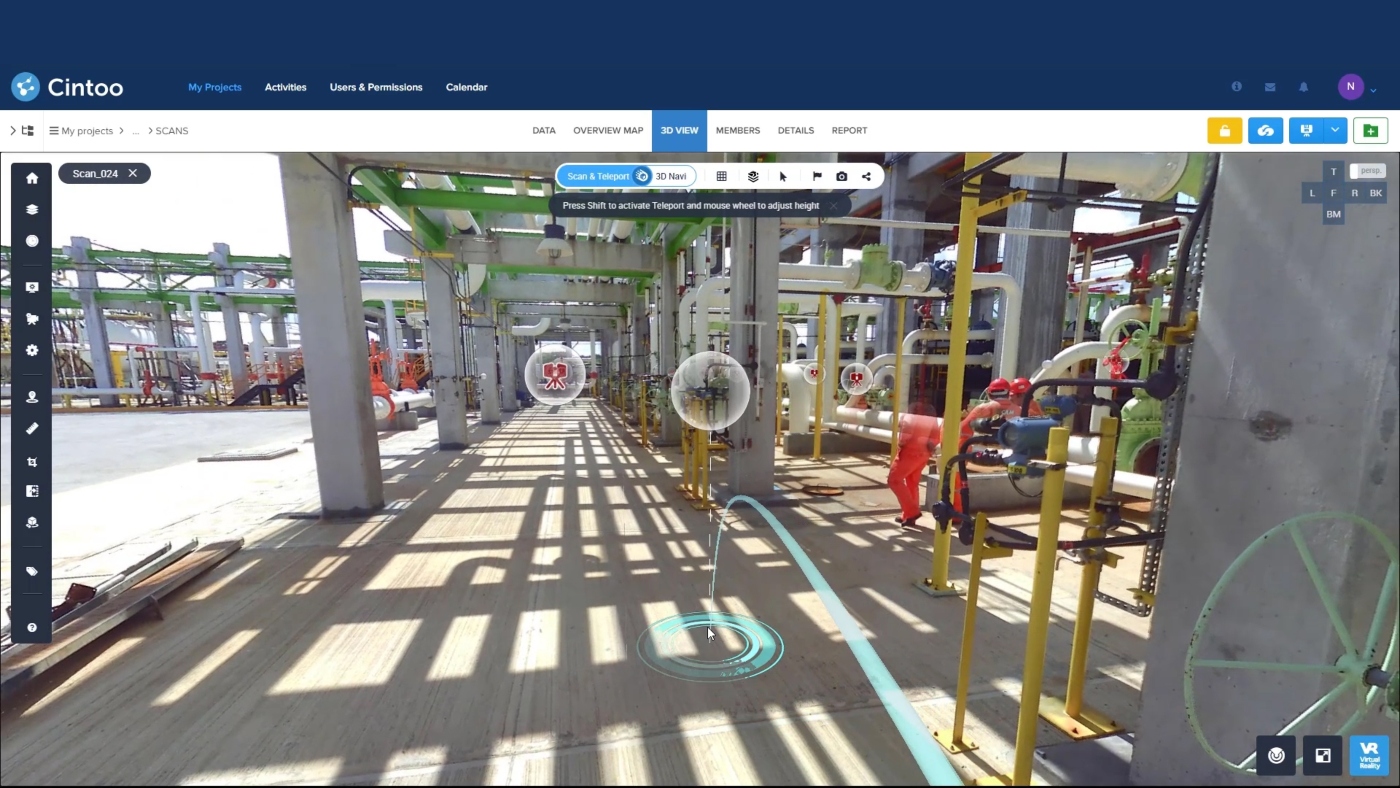
Since its first release in 2019, Cintoo Cloud has been leveraging a unique point cloud-to-mesh technology that turns each scanning position into a multiresolution 3D mesh that can be easily and quickly streamed in a web browser, providing access to anyone, anywhere. This proprietary technology preserves the accuracy of the source sensor and the structure of the project (including panoramic images) while compressing the raw scan data by 10 to 20 times, making it much easier to upload and store. Experts and non-experts alike can now navigate their scans in a pure mesh-based experience, viewing 3D surfaces that reveal details that they have never seen before while removing the ambiguity of point cloud viewing. The success has been phenomenal over the last 3 years with almost 450 corporations and 55,000 users now using the platform in 43 countries.
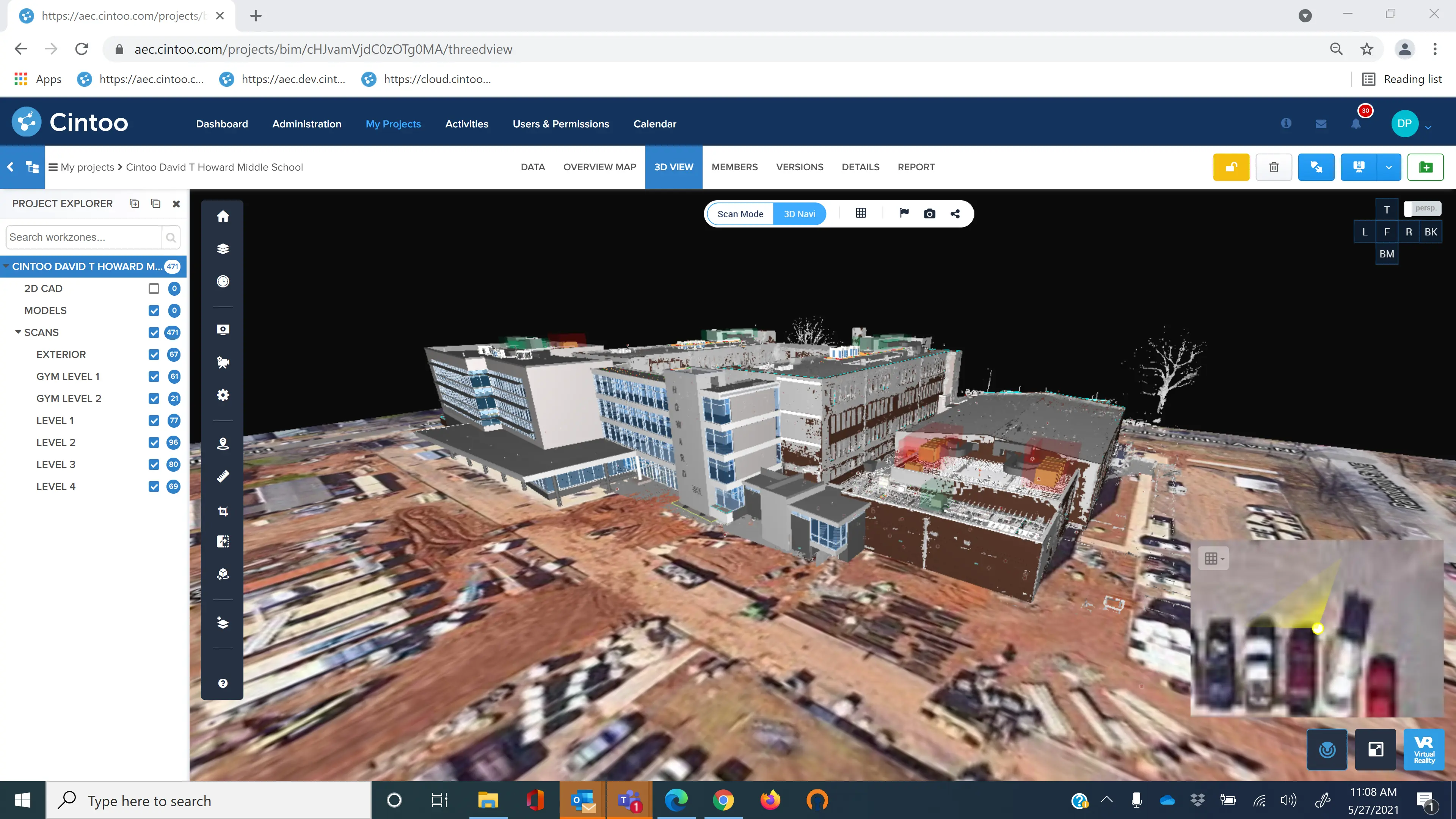
Now, Cintoo is proud to announce the release of its new TurboMesh™ engine, extending our acclaimed browser-based, mesh-based viewing experience to full 3D navigation in addition to scan-to-scan navigation! With TurboMesh™, anyone can navigate the scans and experience the as-built data as 3D surfaces down to the resolution of the source scanner: no compromise in accuracy!
TurboMesh™ is not like viewing a photo-textured mesh generated from point clouds: such photo-textured meshes provide an interesting 3D viewing experience but they compromise on scanner resolution and accuracy for walkthrough performances, adversely constraining your engineering capability. With TurboMesh™, no such compromise is needed: TurboMesh™ will stream your mesh-based reality data at the resolution and accuracy of your source scanner, preserving your analysis, measurement and annotation capability. You can also revert this mesh-based data back to its source point cloud format (structured or unstructured) when you need to distribute your data via the cloud for modeling in 3D modeling apps such as Autodesk Revit or Navisworks.
TurboMesh™ complements our recent release of Cintoo Connect 2.0, our Windows connector that turns unstructured data from indoor mobile devices into structured data, as if those point clouds would have been captured with a static scanner. Supported devices include the NavVis VLX or M6, Viametris BSM3D, GeoSLAM Zeb Series, Gexcel Heron, Emesent Hovermap or the Leica BLK2GO. And there is more to come with the support of drone data… With Cintoo Connect 2.0, Cintoo Cloud becomes the reference hardware agnostic platform for all kinds of reality capture modality, providing the unique navigation and interpretation experience that will maximize your reality capture investments.
3D scans of all types are now finally ready for BIM or Digital Twin workflows and for Metaverse experiences for everybody, experts and non-experts alike.
With this advancement you may agree that point cloud viewing is becoming obsolete…