Ist die Betrachtung von Punktwolken veraltet?
Das 3D-Laserscanning wurde in den 1960er Jahren erfunden und wird seit den 1990er Jahren für Design und Technik eingesetzt. Von Anfang an hat die diskrete Natur der Laserscanning-Technologie diktiert, wie die resultierenden 3D-Daten dem Benutzer präsentiert werden. Daher ist die Darstellung des Ist-Zustandes als Punktwolke zur Norm geworden. Aber unsere Welt besteht aus Oberflächen, nicht aus 3D-Punkten! Der Scan-Sensor sollte nicht die Art und Weise vorgeben, wie wir die erfassten Informationen betrachten. Eine Punktwolke zu betrachten und zu nutzen ist keine leichte Aufgabe. Diese Art von Daten ist für Laien schwierig zu interpretieren und zu navigieren und für Experten mühsam. Das Gleiche gilt für viele verschiedene Anwendungsfälle: Versuchen Sie nicht, Ultraschall- oder MRT-Daten zu verstehen, wenn Sie nicht über einige Jahre Erfahrung in der medizinischen Bildgebung verfügen!
Mit dem Aufkommen des Laserscannings, das sich dank der jüngsten Fortschritte bei statischen und mobilen Scannern, Drohnen und SLAM-Technologien durchgesetzt hat, wird eine optimierte Lösung benötigt. Jetzt ist es an der Zeit, den Zugang und die Nutzung solcher vertrauenswürdigen Daten zu demokratisieren, was jedoch mit der Betrachtung von Punktwolken nicht möglich ist.
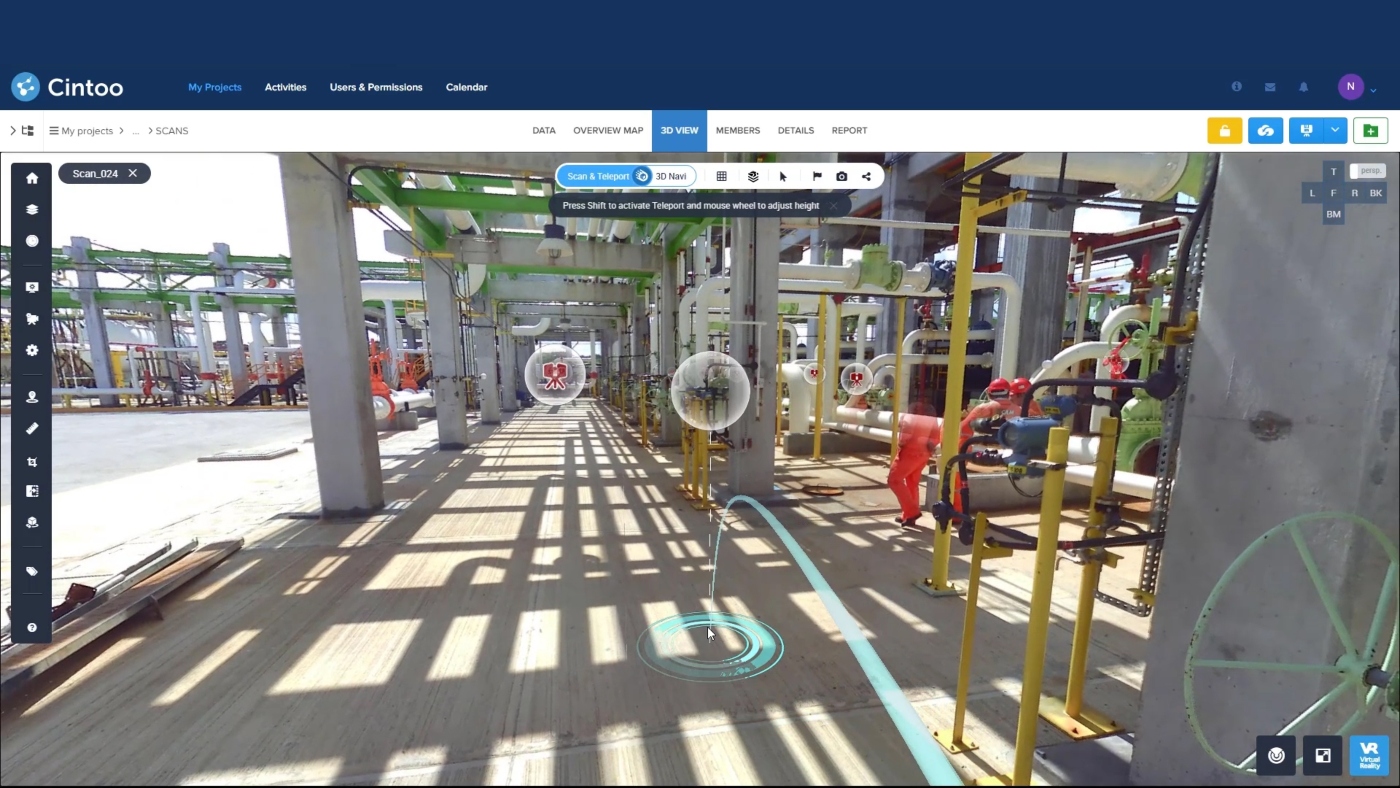
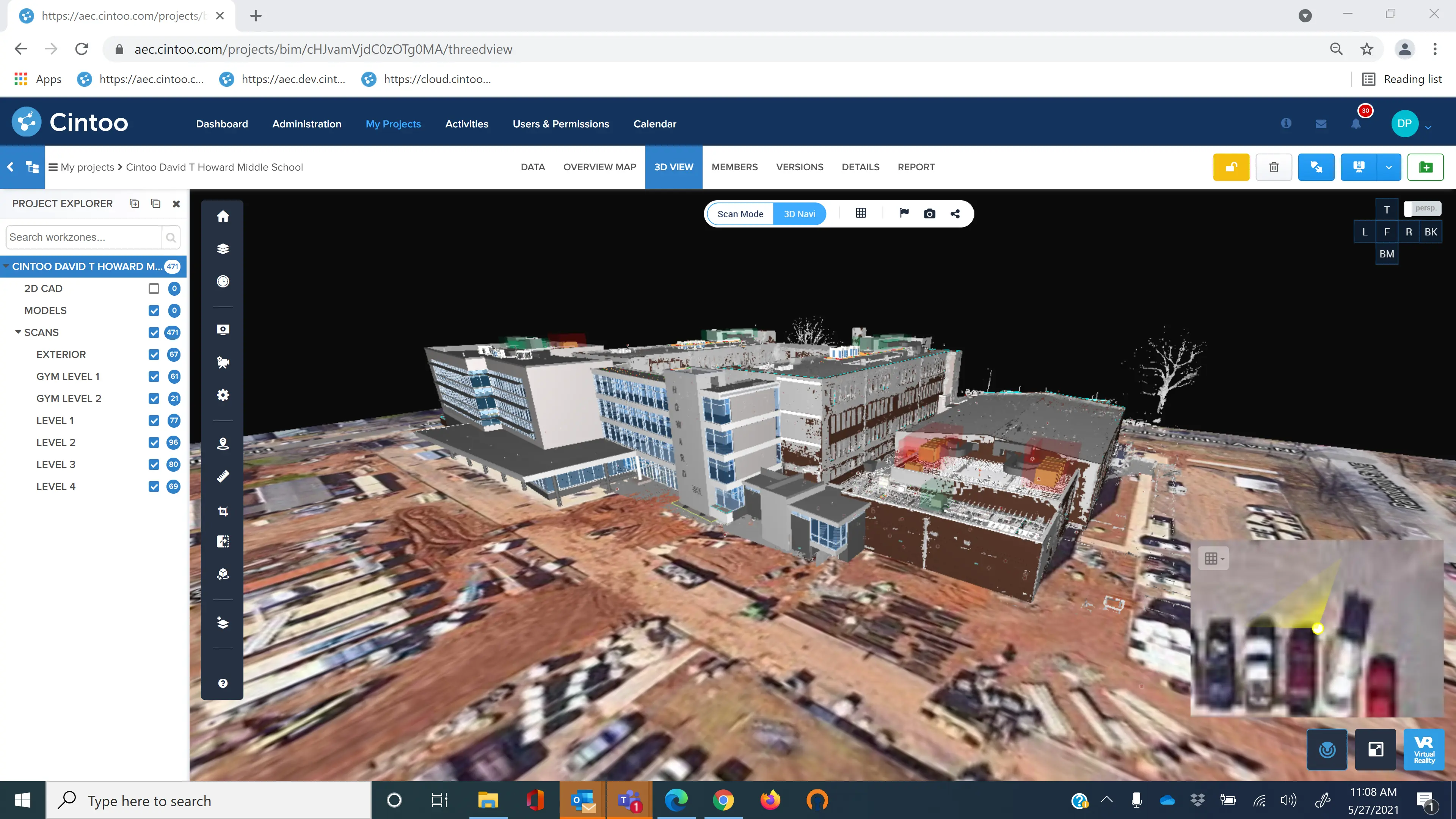
Seit der ersten Veröffentlichung im Jahr 2019 nutzt Cintoo Cloud eine einzigartige Point Cloud-to-Mesh Technologie, die jede Scanposition in ein 3D-Netz mit mehreren Auflösungen umwandelt, das einfach und schnell in einem Webbrowser gestreamt werden kann, so dass jeder und überall darauf zugreifen kann. Diese proprietäre Technologie bewahrt die Genauigkeit des Ausgangssensors und die Struktur des Projekts (einschließlich Panoramabildern) und komprimiert die Scan-Rohdaten um das 10- bis 20-fache, was das Hochladen und Speichern erheblich erleichtert. Sowohl Experten als auch Laien können nun durch ihre Scans in einer rein netzbasierten Erfahrung navigieren und 3D-Oberflächen betrachten, die Details offenbaren, die sie zuvor nicht gesehen haben, während die Mehrdeutigkeit der Punktwolkenansicht beseitigt ist. Der Erfolg war in den letzten drei Jahren phänomenal: Fast 450 Unternehmen und 55.000 Nutzer in 43 Ländern verwenden die Plattform inzwischen.
Jetzt ist Cintoo stolz darauf, die Veröffentlichung seiner neuen TurboMesh™-Engine bekannt zu geben, die unser gefeiertes browserbasiertes, netzbasiertes Betrachtungserlebnis auf eine vollständige 3D-Navigation zusätzlich zur Scan-to-Scan-Navigation erweitert! Mit TurboMesh™ kann jeder durch die Scans navigieren und die Bestandsdaten als 3D-Oberflächen bis hinunter zur Auflösung des Quellscanners erleben: ohne Kompromisse bei der Genauigkeit!
TurboMesh™ ist nicht vergleichbar mit der Betrachtung eines fototexturierten Netzes, das aus Punktwolken generiert wurde: solche fototexturierten Netze bieten ein interessantes 3D-Betrachtungserlebnis, aber sie gehen Kompromisse bei der Scannerauflösung und -genauigkeit für Walkthrough-Darstellungen ein und schränken Ihre technischen Möglichkeiten ein. Mit TurboMesh™ ist ein solcher Kompromiss nicht erforderlich: TurboMesh™ streamt Ihr netzbasiertes reality data mit der Auflösung und Genauigkeit Ihres Quellscanners, wobei Ihre Analyse-, Mess- und Anmerkungsmöglichkeiten erhalten bleiben. Sie können diese netzbasierten Daten auch in das ursprüngliche Punktwolkenformat (strukturiert oder unstrukturiert) zurückversetzen, wenn Sie Ihre Daten über die Cloud für die Modellierung in 3D-Modellierungsanwendungen wie Autodesk Revit oder Navisworks verteilen müssen.
TurboMesh™ ergänzt unsere jüngste Version von Cintoo Connect 2 .0, unserem Windows-Konnektor, der unstrukturierte Daten von mobilen Innenraumgeräten in strukturierte Daten umwandelt, als ob diese Punktwolken mit einem statischen Scanner erfasst worden wären. Zu den unterstützten Geräten gehören der NavVis VLX oder M6, Viametris BSM3D, GeoSLAM Zeb Series, Gexcel Heron, Emesent Hovermap oder der Leica BLK2GO. Und mit der Unterstützung von Drohnendaten kommt noch mehr... Mit Cintoo Connect 2.0 wird Cintoo Cloud zur hardwareunabhängigen Referenzplattform für alle Arten von Reality Capture-Modalitäten und bietet eine einzigartige Navigations- und Interpretationserfahrung, die Ihre Investitionen in Reality Capture maximiert.
3D-Scans aller Art sind nun endlich bereit für BIM oder Digital Twin Workflows und für Metaverse-Erfahrungen für alle, Experten und Nicht-Experten gleichermaßen.
Angesichts dieses Fortschritts werden Sie vielleicht zustimmen, dass die Betrachtung von Punktwolken obsolet wird...