La visualisation des nuages de points est-elle obsolète ?
Le balayage laser 3D a été inventé dans les années 1960 et a commencé à être utilisé pour la conception et l'ingénierie dans les années 1990. Depuis le début, la nature discrète de la technologie de balayage laser a dicté la façon dont les données 3D résultantes seraient présentées à l'utilisateur. Par conséquent, la visualisation de vos conditions de construction sous forme de nuage de points est devenue la norme. Mais notre monde est fait de surfaces, pas de points 3D ! Le capteur de numérisation ne doit pas dicter la façon dont nous visualisons les informations capturées. La visualisation et la consommation d'un nuage de points n'est pas une tâche facile. En voyant à travers les points, ce type de données est difficile à interpréter et à naviguer pour les non-experts, et fastidieux pour les experts. Il en va de même pour de nombreux cas d'utilisation différents : n'essayez pas de comprendre des données d'échographie ou d'IRM si vous n'avez pas quelques années d'expérience en imagerie médicale !
Avec l'avènement du balayage laser qui se généralise grâce aux progrès récents des scanners statiques et mobiles, du balayage par drone et des technologies SLAM, une solution optimisée est nécessaire. Le moment est venu de démocratiser l'accès et la consommation de ces données fiables, mais cela n'est pas possible avec la visualisation de nuages de points.
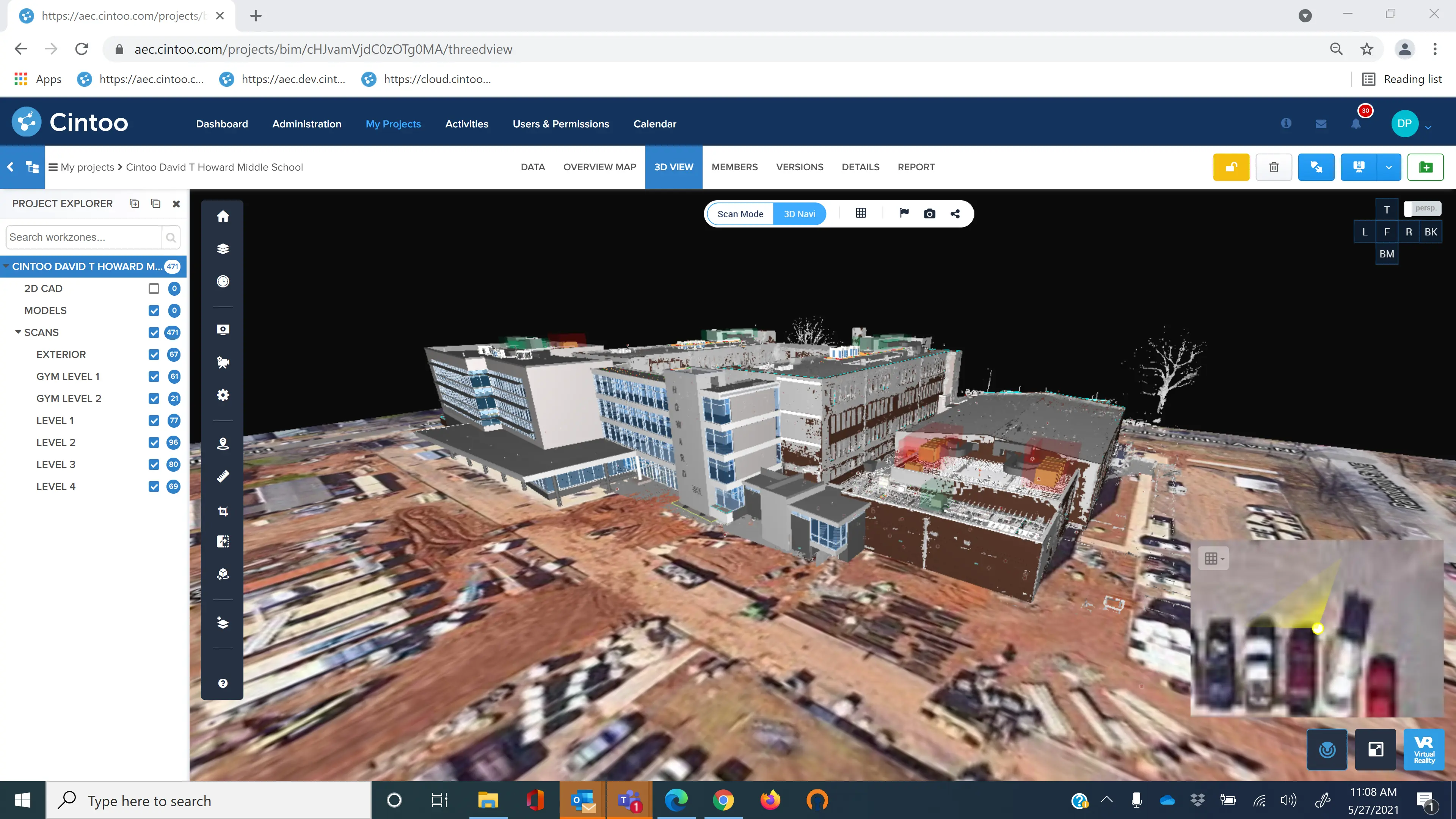
Depuis sa première version en 2019, Cintoo Cloud s'appuie sur un système unique de gestion de l'information. nuage de points vers maillage qui transforme chaque position de numérisation en un maillage 3D multirésolution qui peut être facilement et rapidement diffusé dans un navigateur Web, offrant un accès à n'importe qui, n'importe où. Cette technologie exclusive préserve la précision du capteur source et la structure du projet (y compris les images panoramiques) tout en compressant les données brutes de numérisation de 10 à 20 fois, ce qui les rend beaucoup plus faciles à télécharger et à stocker. Les experts et les non-spécialistes peuvent désormais naviguer dans leurs numérisations dans une expérience purement basée sur le maillage, en visualisant des surfaces 3D qui révèlent des détails qu'ils n'ont jamais vus auparavant, tout en éliminant l'ambiguïté de la visualisation des nuages de points. Le succès a été phénoménal au cours des trois dernières années : près de 450 entreprises et 55 000 utilisateurs utilisent aujourd'hui la plateforme dans 43 pays.
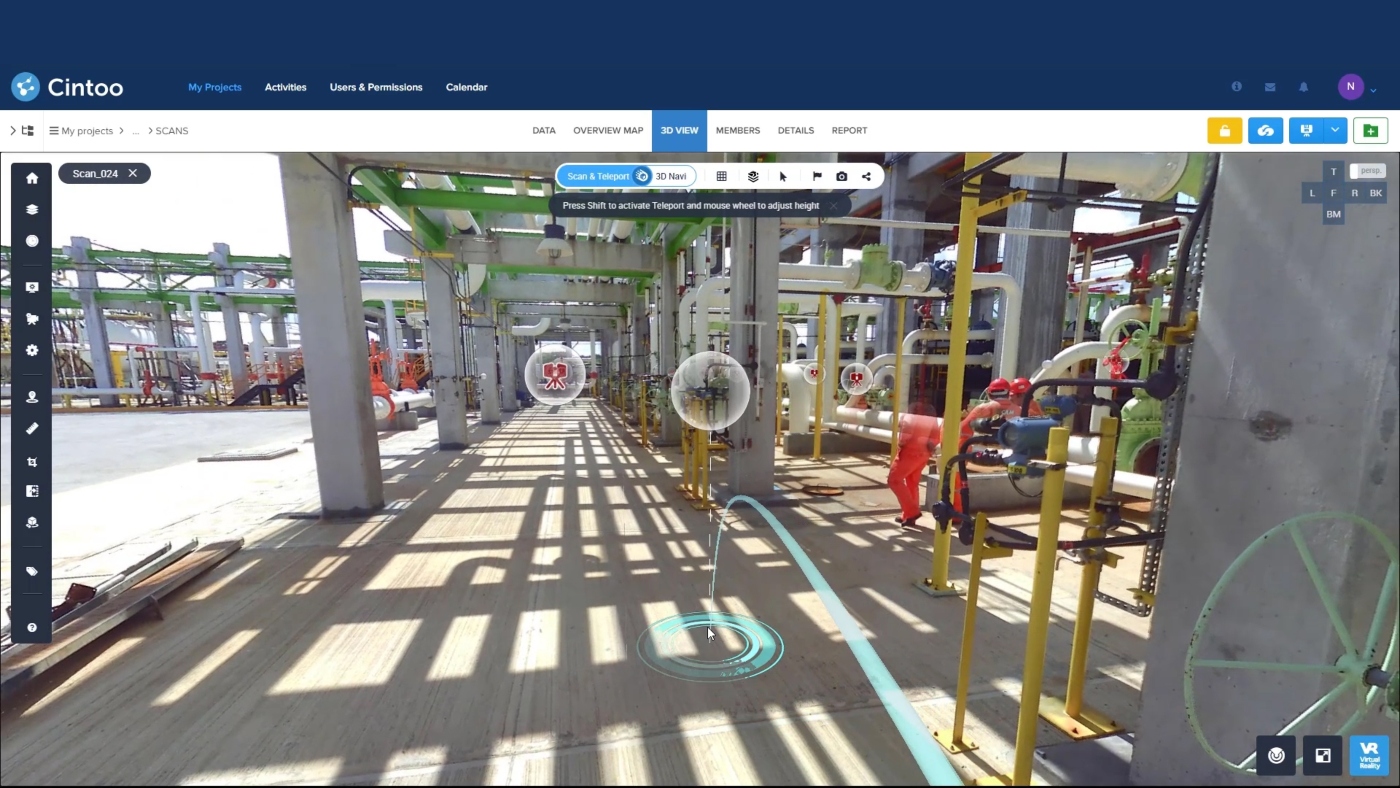
Aujourd'hui, Cintoo est fier d'annoncer la sortie de son nouveau moteur TurboMesh™, qui étend notre expérience de visualisation par navigateur, basée sur le maillage, à la navigation 3D complète en plus de la navigation de scan à scan ! Avec TurboMesh™, n'importe qui peut naviguer dans les scans et découvrir les données construites sous forme de surfaces 3D jusqu'à la résolution du scanner source : aucun compromis sur la précision !
TurboMesh™ n'est pas comme la visualisation d'un maillage photo-texturé généré à partir de nuages de points : de tels maillages photo-texturés offrent une expérience de visualisation 3D intéressante, mais ils compromettent la résolution et la précision du scanner pour les performances walkthrough, ce qui contraint négativement votre capacité d'ingénierie. Avec TurboMesh™, un tel compromis n'est pas nécessaire : TurboMesh™ diffusera votre maillage reality data à la résolution et à la précision de votre scanner source, préservant ainsi vos capacités d'analyse, de mesure et d'annotation. Vous pouvez également ramener ces données maillées à leur format de nuage de points source (structuré ou non) lorsque vous devez distribuer vos données via le cloud pour les modéliser dans des applications de modélisation 3D telles qu'Autodesk Revit ou Navisworks.
TurboMesh™ complète notre récente version de Cintoo Connect 2 .0, notre connecteur Windows qui transforme les données non structurées provenant d'appareils mobiles d'intérieur en données structurées, comme si ces nuages de points avaient été capturés à l'aide d'un scanner statique. Les appareils pris en charge sont les NavVis VLX ou M6, Viametris BSM3D, GeoSLAM Zeb Series, Gexcel Heron, Emesent Hovermap ou Leica BLK2GO. Avec Cintoo Connect 2.0, Cintoo Cloud devient la plateforme de référence agnostique pour tous les types de modalité de capture de la réalité, offrant une expérience unique de navigation et d'interprétation qui maximisera vos investissements dans la capture de la réalité.
Les scans 3D de tous types sont enfin prêts pour les flux de travail BIM ou Digital Twin et pour les expériences Metaverse pour tout le monde, experts et non-experts.
Avec cette avancée, vous pouvez convenir que la visualisation des nuages de points devient obsolète...