点群ビューは時代遅れ?
3Dレーザースキャンは1960年代に発明され、1990年代から設計やエンジニアリングに使用され始めました。当初から、レーザースキャニング技術の離散的な性質が、結果として得られる3Dデータをどのようにユーザーに見せるかを決定していました。そのため、建設時の状態を点群として見るのが普通になっています。しかし、私たちの世界は表面でできており、3Dの点ではありません。スキャニングセンサーが、取得した情報の表示方法を決めるべきではありません。点群データを見るのは簡単なことではありません。この種のデータは、点を通して見ると、専門家でなくても解釈や操作が難しく、専門家にとっては退屈なものです。同じことが、さまざまなユースケースに当てはまります。医療画像に関する数年の経験がない場合は、超音波やMRIのデータを理解しようとしないでください
近年、静止型スキャナーやモバイルスキャナー、ドローンスキャニング、SLAM技術の進歩により、レーザースキャンが主流になりつつあり、最適なソリューションが必要とされています。今こそ、このような信頼できるデータへのアクセスと消費を民主化する時ですが、点群表示では不可能です。
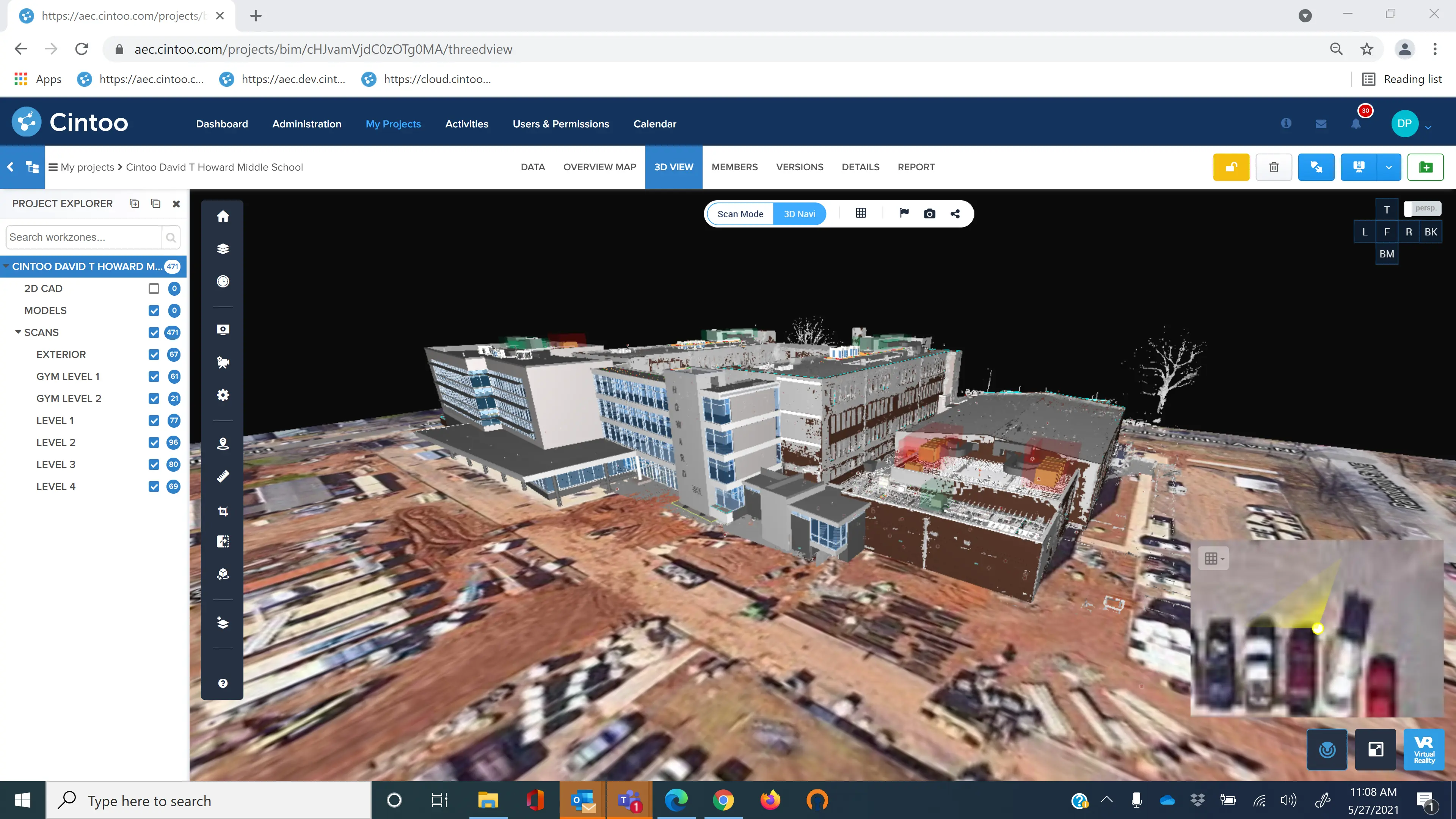
2019年の最初のリリース以来、Cintoo Cloud はユニークな点を活用している。 点クラウド・トゥ・メッシュ技術により、各スキャン位置をマルチ解像度3Dメッシュに変換し、ウェブブラウザで簡単かつ迅速にストリーミングできるため、誰でも、どこからでもアクセスできる。この独自技術は、ソースセンサーの精度とプロジェクトの構造(パノラマ画像を含む)を維持しながら、生のスキャンデータを10倍から20倍に圧縮し、アップロードと保存をより簡単にします。専門家もそうでない人も同様に、純粋なメッシュベースのエクスペリエンスでスキャンをナビゲートできるようになり、点群ビューの曖昧さを取り除きながら、これまで見たことのない詳細が明らかになる3Dサーフェスを見ることができます。この3年間の成功は驚異的で、現在43カ国で約450の企業と55,000人のユーザーがこのプラットフォームを利用している。
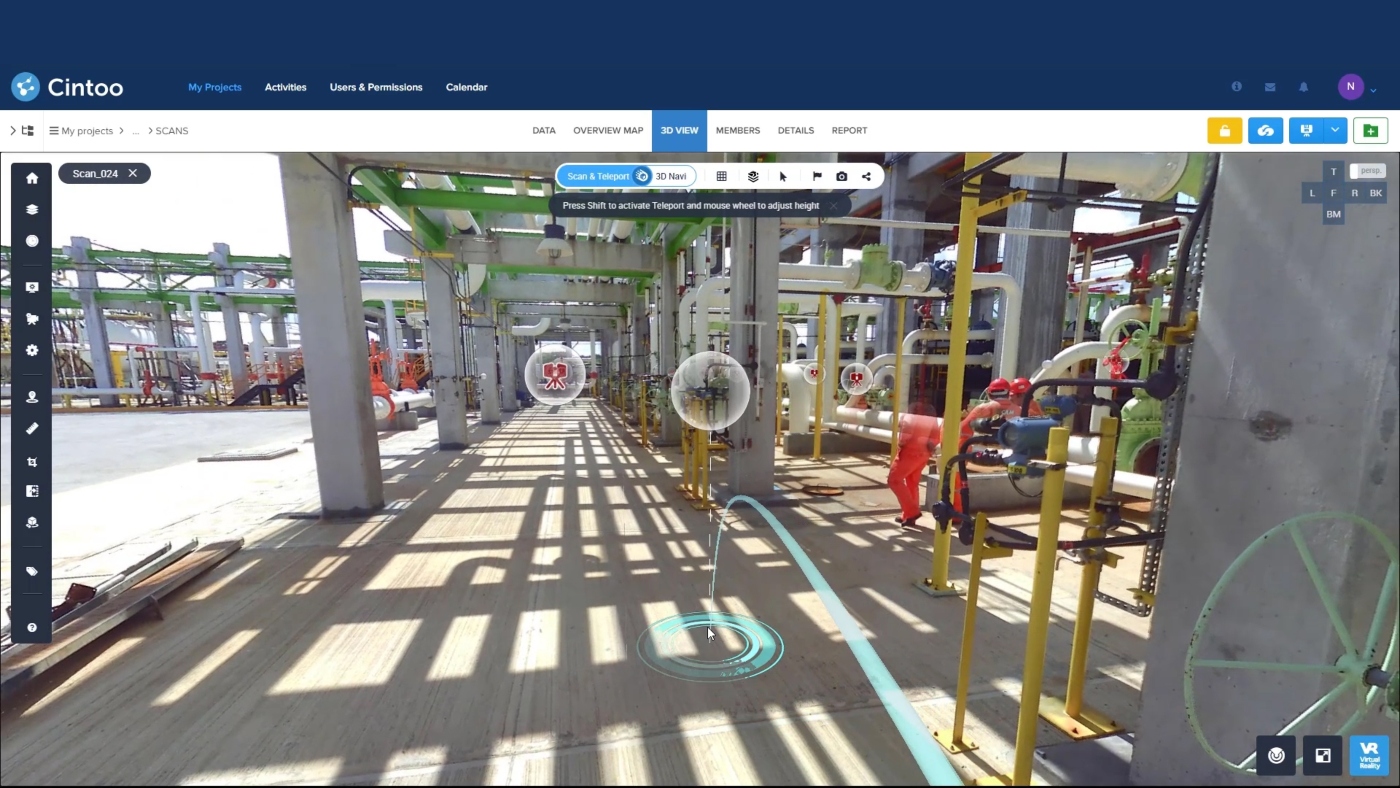
この度、Cintooは新しいTurboMesh™エンジンをリリースし、ブラウザベースのメッシュベースの閲覧体験を、スキャン間のナビゲーションに加え、フル3Dナビゲーションにまで拡張したことを発表いたします。TurboMesh™を使用すれば、誰でもスキャンをナビゲートし、ソーススキャナーの解像度まで3Dサーフェスとしてアズビルドデータを体験することができます。
TurboMesh™は、点群から生成された写真テクスチャのメッシュを表示するようなものではありません。このような写真テクスチャのメッシュは、興味深い3D表示体験を提供しますが、ウォークスルー性能のためにスキャナーの解像度と精度を妥協し、エンジニアリング能力を逆に制約してしまいます。TurboMesh™では、そのような妥協は必要ありません:TurboMesh™は、メッシュベースのreality data 、ソーススキャナーの解像度と精度でストリーミングし、解析、測定、注釈機能を維持します。また、Autodesk Revit や Navisworks などの 3D モデリング アプリケーションでモデリングするためにクラウド経由でデータを配布する必要がある場合は、このメッシュ ベースのデータをソース点群形式 (構造化または非構造化) に戻すこともできます。
TurboMesh™は、最近リリースされたCintoo Connect 2.0を補完するものです。このWindowsコネクターは、屋内モバイルデバイスからの非構造化データを構造化データに変換し、これらの点群が静的スキャナーでキャプチャされたかのようにします。サポートされているデバイスは、NavVis VLXまたはM6、Viametris BSM3D、GeoSLAM Zebシリーズ、Gexcel Heron、Emesent Hovermap、Leica BLK2GOなどです。Cintoo Connect 2.0により、Cintoo Cloud は、あらゆる種類のリアリティ・キャプチャ・モダリティ用のハードウェアにとらわれないリファレンス・プラットフォームとなり、リアリティ・キャプチャへの投資を最大化するユニークなナビゲーションと解釈体験を提供します。
あらゆるタイプの3Dスキャンが、ようやくBIM 、デジタルツインのワークフローや、専門家もそうでない人も、誰もがメタバースを体験できるようになった。
これだけ進化すれば、「点群ビューは時代遅れだ」と思うかもしれません...。