Is het bekijken van puntenwolken verouderd?
3D-laserscannen werd uitgevonden in de jaren 1960 en begon te worden gebruikt voor ontwerp en engineering in de jaren 1990. Vanaf het begin heeft de discrete aard van de laserscantechnologie gedicteerd hoe de resulterende 3D-gegevens aan de gebruiker zouden worden gepresenteerd. Daarom is het bekijken van de bestaande situatie als een puntenwolk de norm geworden. Maar onze wereld bestaat uit oppervlakken, niet uit 3D-punten! De scansensor moet niet dicteren hoe we de vastgelegde informatie bekijken. Het bekijken en consumeren van een puntenwolk is geen eenvoudige taak. Door de punten heen kijken is moeilijk te interpreteren en te navigeren voor niet-deskundigen, en vervelend voor deskundigen. Hetzelfde geldt voor veel verschillende gebruikssituaties: probeer echografie- of MRI-gegevens niet te begrijpen als je niet een paar jaar ervaring hebt met medische beeldvorming!
Nu laserscannen gemeengoed wordt dankzij recente ontwikkelingen op het gebied van statische en mobiele scanners, drone scanning en SLAM-technologieën, is er behoefte aan een geoptimaliseerde oplossing. Het is nu tijd om de toegang tot en het gebruik van dergelijke betrouwbare gegevens te democratiseren, maar dit is niet mogelijk met het bekijken van puntenwolken.
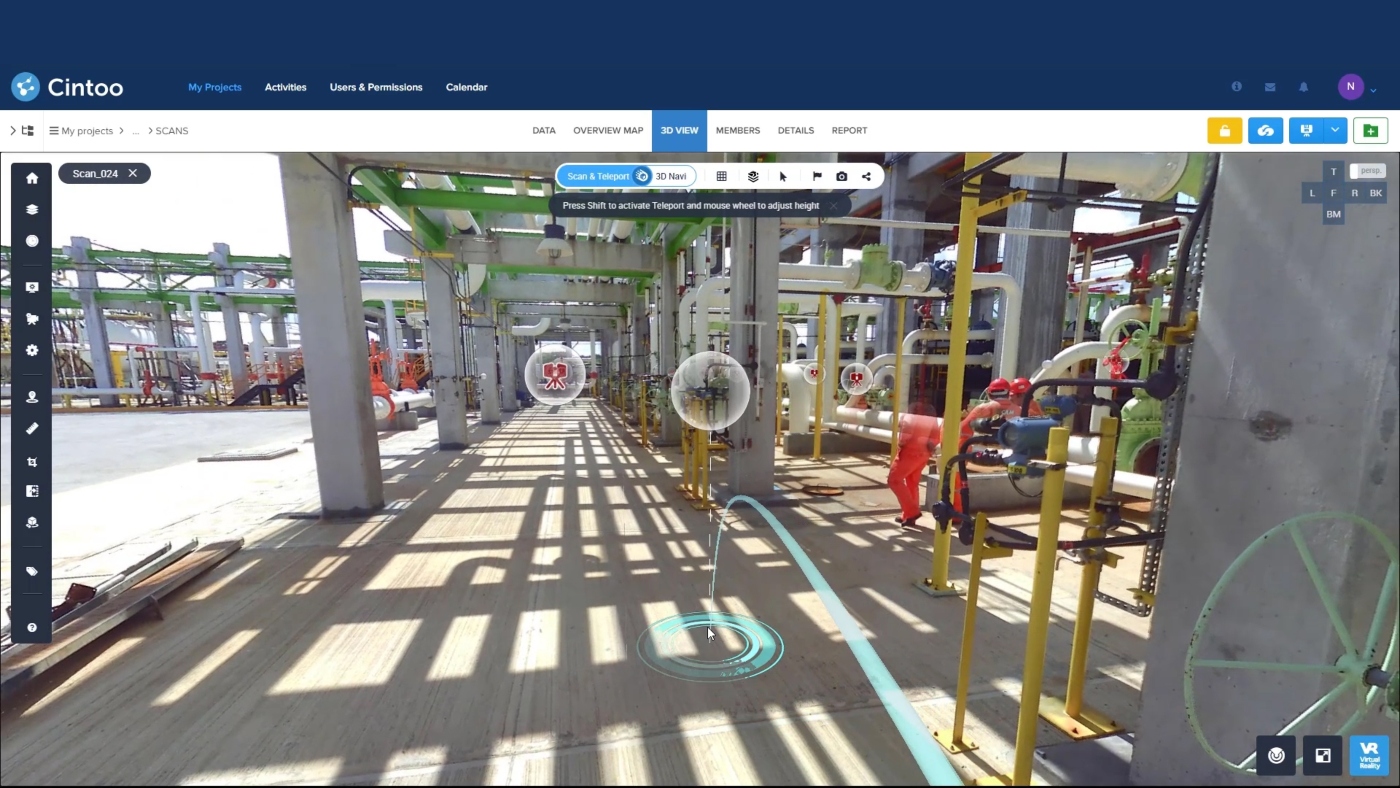
Sinds de eerste release in 2019 maakt Cintoo Cloud gebruik van een uniek puntwolk-naar-maas technologie die elke scanpositie omzet in een multiresolutie 3D mesh die eenvoudig en snel kan worden gestreamd in een webbrowser, zodat iedereen en overal toegang heeft. Deze gepatenteerde technologie behoudt de nauwkeurigheid van de bronsensor en de structuur van het project (inclusief panoramische beelden), terwijl de ruwe scangegevens 10 tot 20 keer worden gecomprimeerd, waardoor ze veel gemakkelijker te uploaden en op te slaan zijn. Zowel experts als niet-experts kunnen nu door hun scans navigeren in een pure mesh-gebaseerde ervaring, waarbij 3D-oppervlakken worden bekeken die details onthullen die ze nooit eerder hebben gezien, terwijl de dubbelzinnigheid van het bekijken van puntenwolken wordt weggenomen. Het succes was de afgelopen 3 jaar fenomenaal met bijna 450 bedrijven en 55.000 gebruikers die het platform nu in 43 landen gebruiken.
Cintoo kondigt nu met trots de nieuwe TurboMesh™ engine aan, die onze veelgeprezen browsergebaseerde, mesh-gebaseerde kijkervaring uitbreidt naar volledige 3D-navigatie naast de scan-navigatie! Met TurboMesh™ kan iedereen door de scans navigeren en de as-built data ervaren als 3D oppervlakken tot aan de resolutie van de bronscanner: geen compromis in nauwkeurigheid!
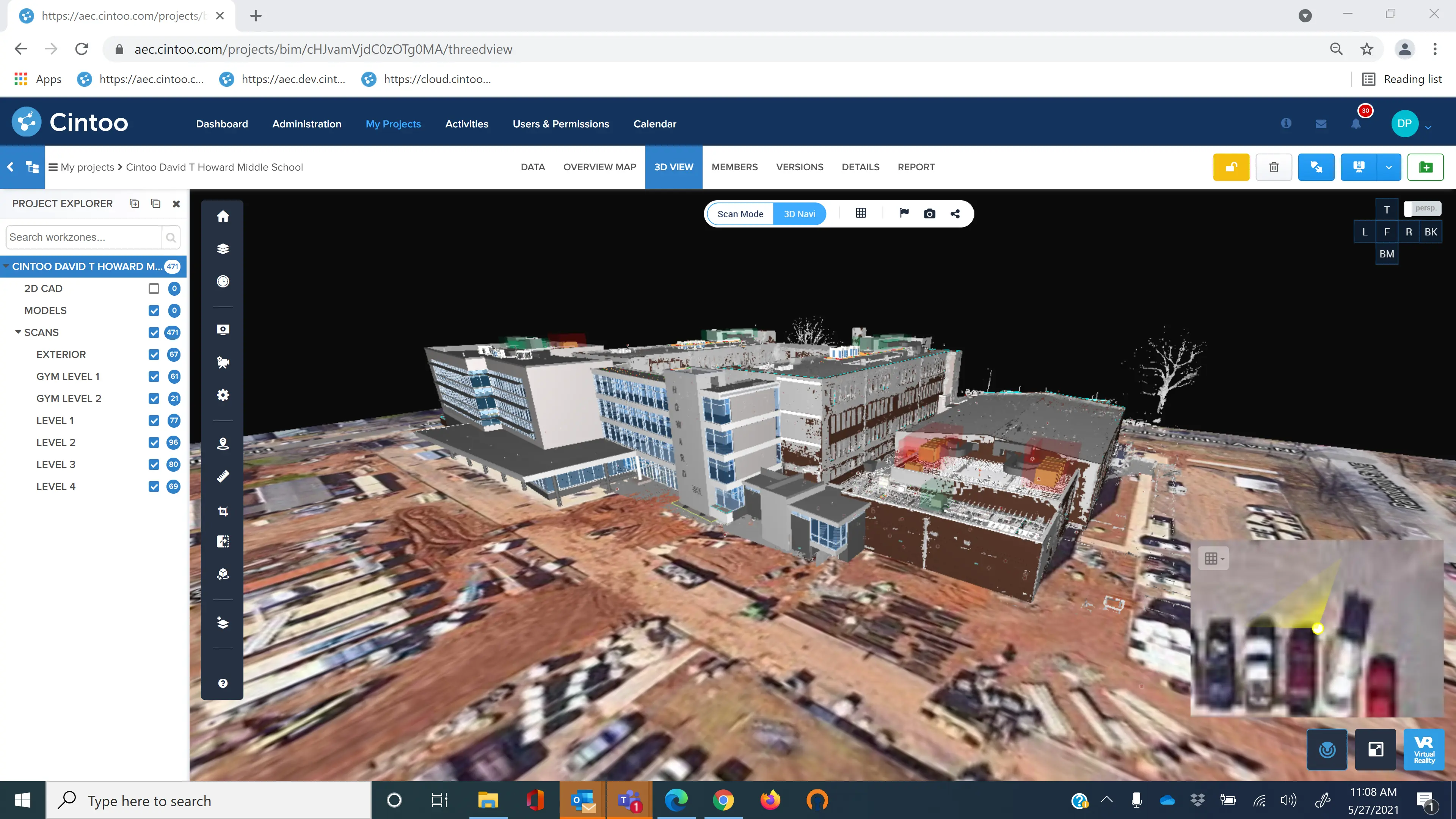
TurboMesh™ is niet hetzelfde als het bekijken van een mesh met fototextuur die is gegenereerd uit puntenwolken: zulke mesh met fototextuur biedt een interessante 3D kijkervaring, maar ze leveren in op scannerresolutie en -nauwkeurigheid voor walkthrough-uitvoeringen, waardoor uw engineeringmogelijkheden nadelig worden beperkt. Met TurboMesh™ is zo'n compromis niet nodig: TurboMesh™ streamt uw op mesh gebaseerde reality data met de resolutie en nauwkeurigheid van uw bronscanner, waardoor uw analyse-, meet- en annotatiemogelijkheden behouden blijven. U kunt deze mesh-gebaseerde gegevens ook terugzetten naar het bronpuntwolkformaat (gestructureerd of ongestructureerd) wanneer u uw gegevens via de cloud moet distribueren voor modellering in 3D-modelleringsapps zoals Autodesk Revit of Navisworks.
TurboMesh™ is een aanvulling op onze recente release van Cintoo Connect 2 .0, onze Windows-connector die ongestructureerde data van indoor mobiele apparaten omzet in gestructureerde data, alsof deze puntenwolken zouden zijn vastgelegd met een statische scanner. Ondersteunde apparaten zijn onder andere de NavVis VLX of M6, Viametris BSM3D, GeoSLAM Zeb Series, Gexcel Heron, Emesent Hovermap of de Leica BLK2GO. En er komt nog meer met de ondersteuning van drone data... Met Cintoo Connect 2.0 wordt Cintoo Cloud het platform voor hardware agnostische referentie voor alle soorten reality capture modaliteiten, dat de unieke navigatie- en interpretatie-ervaring biedt die uw investeringen in reality capture zal maximaliseren.
3D-scans van alle soorten zijn nu eindelijk klaar voor BIM of Digital Twin workflows en voor Metaverse-ervaringen voor iedereen, zowel experts als niet-experts.
Met deze vooruitgang ben je het er misschien wel mee eens dat het bekijken van puntenwolken overbodig wordt...