¿Está obsoleta la visualización de nubes de puntos?
El escaneado láser 3D se inventó en la década de 1960 y comenzó a utilizarse para el diseño y la ingeniería en la década de 1990. Desde el principio, la naturaleza discreta de la tecnología de escaneado láser ha dictado la forma en que los datos 3D resultantes se presentan al usuario. Por lo tanto, la visualización de las condiciones de construcción como una nube de puntos se ha convertido en la norma. Pero nuestro mundo está hecho de superficies, no de puntos 3D. El sensor de escaneado no debería dictar la forma de ver la información capturada. Ver y consumir una nube de puntos no es una tarea fácil. Ver a través de los puntos, este tipo de datos es difícil de interpretar y navegar por los no expertos, y tedioso para los expertos. Lo mismo se aplica a muchos casos de uso diferentes: ¡no intentes entender los datos de una ecografía o una resonancia magnética si no tienes unos cuantos años de experiencia en imágenes médicas!
Con la llegada del escaneo láser, que se ha convertido en la corriente principal gracias a los recientes avances en los escáneres estáticos y móviles, el escaneo con drones y las tecnologías SLAM, se necesita una solución optimizada. Ha llegado el momento de democratizar el acceso y el consumo de estos datos de confianza, pero esto no es posible con la visualización de nubes de puntos.
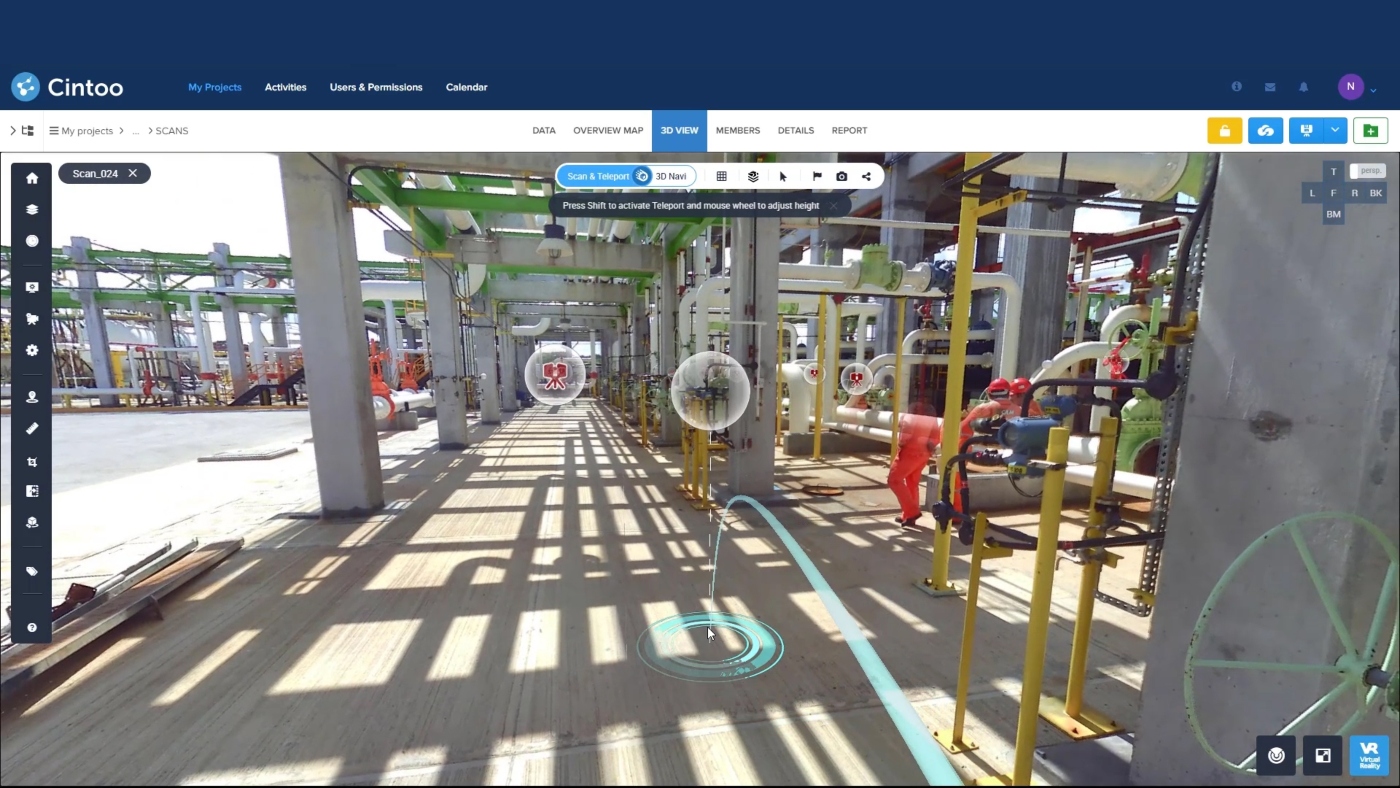
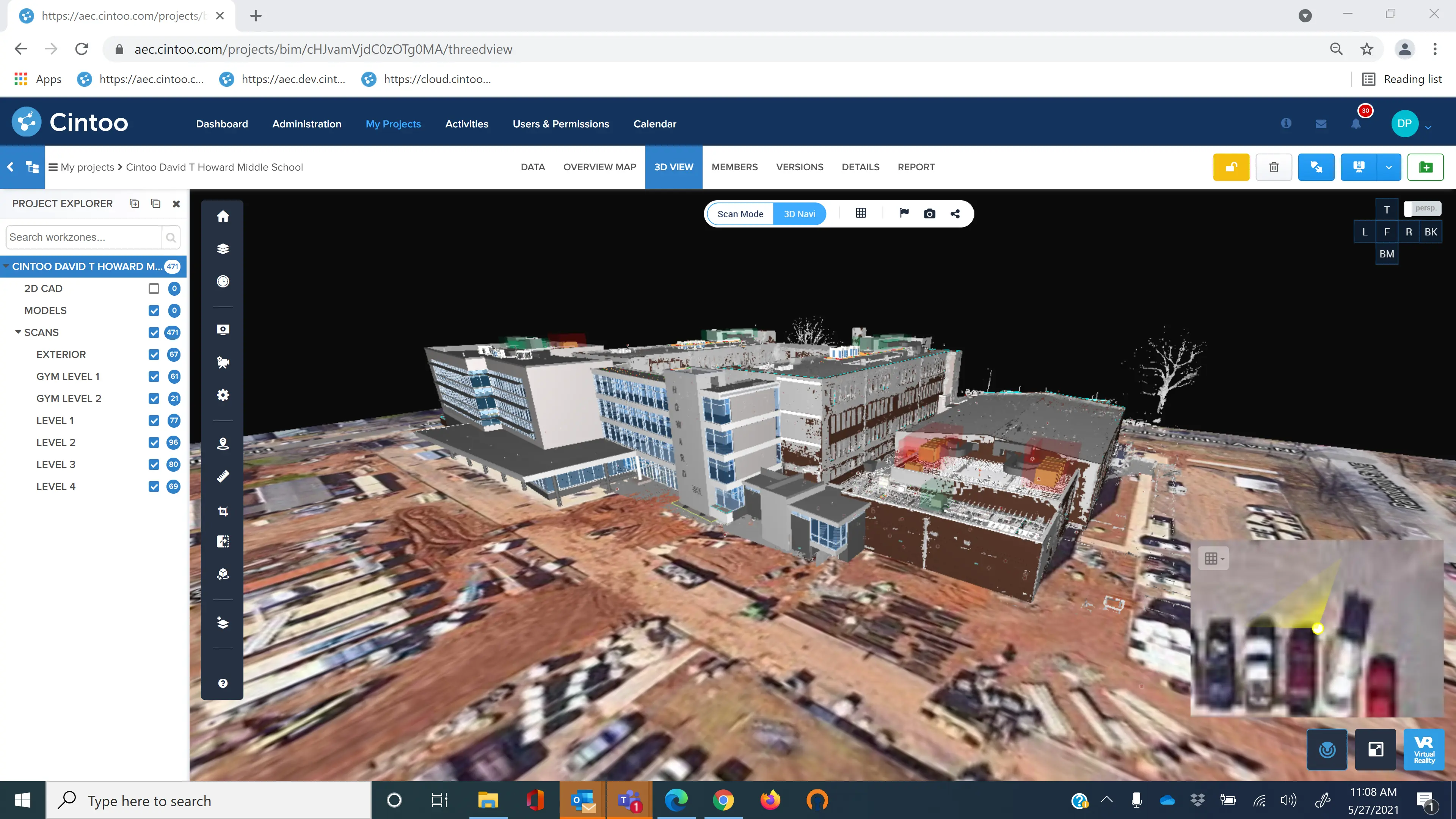
Desde su primera versión en 2019, Cintoo Cloud ha estado aprovechando un único nube de puntos a malla que convierte cada posición de escaneo en una malla 3D multirresolución que se puede transmitir fácil y rápidamente en un navegador web, proporcionando acceso a cualquier persona, en cualquier lugar. Esta tecnología patentada conserva la precisión del sensor de origen y la estructura del proyecto (incluidas las imágenes panorámicas) al tiempo que comprime los datos de escaneado en bruto entre 10 y 20 veces, lo que facilita enormemente su carga y almacenamiento. Expertos y no expertos pueden ahora navegar por sus escaneados en una experiencia basada en mallas puras, visualizando superficies 3D que revelan detalles que nunca antes habían visto, al tiempo que eliminan la ambigüedad de la visualización de nubes de puntos. El éxito ha sido fenomenal en los últimos tres años: casi 450 empresas y 55.000 usuarios utilizan ya la plataforma en 43 países.
Ahora, Cintoo se enorgullece de anunciar el lanzamiento de su nuevo motor TurboMesh™, que amplía nuestra aclamada experiencia de visualización basada en el navegador y en la malla a la navegación completa en 3D, además de la navegación de escaneo a escaneo. Con TurboMesh™, cualquiera puede navegar por los escaneos y experimentar los datos as-built como superficies 3D hasta la resolución del escáner de origen: ¡sin comprometer la precisión!
TurboMesh™ no es como ver una malla foto-texturizada generada a partir de nubes de puntos: estas mallas foto-texturizadas proporcionan una interesante experiencia de visualización en 3D, pero comprometen la resolución del escáner y la precisión de los rendimientos de paseo, limitando negativamente su capacidad de ingeniería. Con TurboMesh™, este compromiso no es necesario: TurboMesh™ transmitirá su reality data basado en malla a la resolución y precisión de su escáner de origen, preservando su capacidad de análisis, medición y anotación. También puede revertir estos datos basados en malla a su formato de nube de puntos de origen (estructurado o no estructurado) cuando necesite distribuir sus datos a través de la nube para el modelado en aplicaciones de modelado 3D como Autodesk Revit o Navisworks.
TurboMesh™ complementa nuestro reciente lanzamiento de Cintoo Connect 2 .0, nuestro conector Windows que convierte datos no estructurados de dispositivos móviles de interior en datos estructurados, como si esas nubes de puntos se hubieran capturado con un escáner estático. Entre los dispositivos compatibles se incluyen NavVis VLX o M6, Viametris BSM3D, GeoSLAM Zeb Series, Gexcel Heron, Emesent Hovermap o Leica BLK2GO. Y hay más por venir con el soporte de datos de drones... Con Cintoo Connect 2.0, Cintoo Cloud se convierte en la plataforma agnóstica de hardware de referencia para todo tipo de modalidad de captura de realidad, proporcionando la experiencia única de navegación e interpretación que maximizará sus inversiones en captura de realidad.
Los escaneados 3D de todo tipo están por fin listos para los flujos de trabajo de BIM o Digital Twin y para experiencias Metaverse para todos, expertos y no expertos.
Con este avance, estará de acuerdo en que la visualización de nubes de puntos se está quedando obsoleta...