Ondanks de ongeëvenaarde nauwkeurigheid en determinisme die lasergebaseerde puntenwolken op aarde bieden bij het vastleggen van de as-built gegevens van een gebouw, blijven er drie belangrijke uitdagingen bestaan: puntenwolkgegevens zijn vaak enorm; het kan moeilijk zijn om precies te interpreteren wat er gebeurt in de donkere ruimtes of overbelichte gebieden; en met al deze 3D-punten in de ruimte is het niet altijd eenvoudig om de juiste punten te kiezen, terwijl het omgekeerd maar al te gemakkelijk is om je te richten op iets dat verder gaat dan waar je naar hoort te kijken.
Deze drie uitdagingen zijn precies de reden waarom Cintoo is opgericht en waarom we onze op 3D mesh gebaseerde puntenwolkgegevens met hoge resolutie hebben gemaakt om elk van deze problemen op te lossen.
Maat
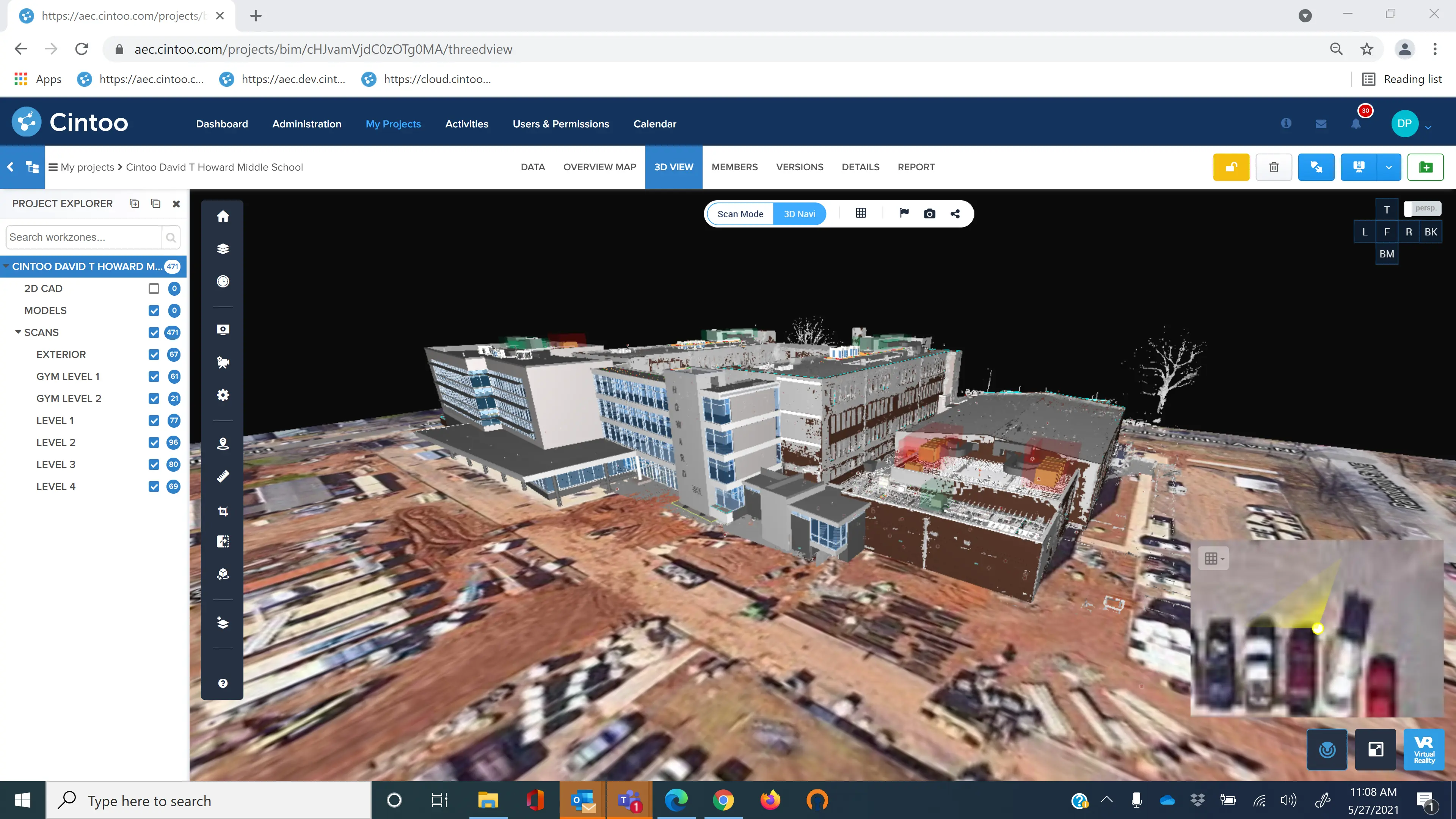
Laserscannen is algemeen geaccepteerd als methode om as-built gegevens vast te leggen, omdat het nauwkeurige puntenwolken oplevert en veel betrouwbaarder is dan fotogrammetrie, met name voor het vastleggen van binnenopnamen. Een veel voorkomend probleem met deze puntenwolkgegevens is echter dat ze enorm groot zijn en daarom vaak op een desktop worden opgeslagen. Het delen van de gegevens gebeurde traditioneel via een harde schijf en tot nu toe was het uploaden van zulke grote gegevens naar de cloud voor visualisatie, delen of distributie een echte uitdaging.
Cintoo Cloud heeft dit allemaal veranderd door puntenwolken om te zetten in 3D oppervlakte mazen, waarbij de gegevens worden gecomprimeerd om ze 10 tot 20 keer kleiner te maken dan de oorspronkelijke grootte met behoud van nauwkeurigheid en projectstructuur. De gegevens zijn kleiner en dus beter beheersbaar en kunnen worden geüpload naar de beveiligde cloud van Cintoo, waar ze kunnen worden bekeken en gedeeld. Bovendien kunnen deze gecomprimeerde gegevens eenvoudig worden omgezet in puntenwolken (E57, RCS of RCP) of verenigde meshes (OBJ, FBX of STL) wanneer dat nodig is voor distributie in de desktopwereld.
Interpretatie
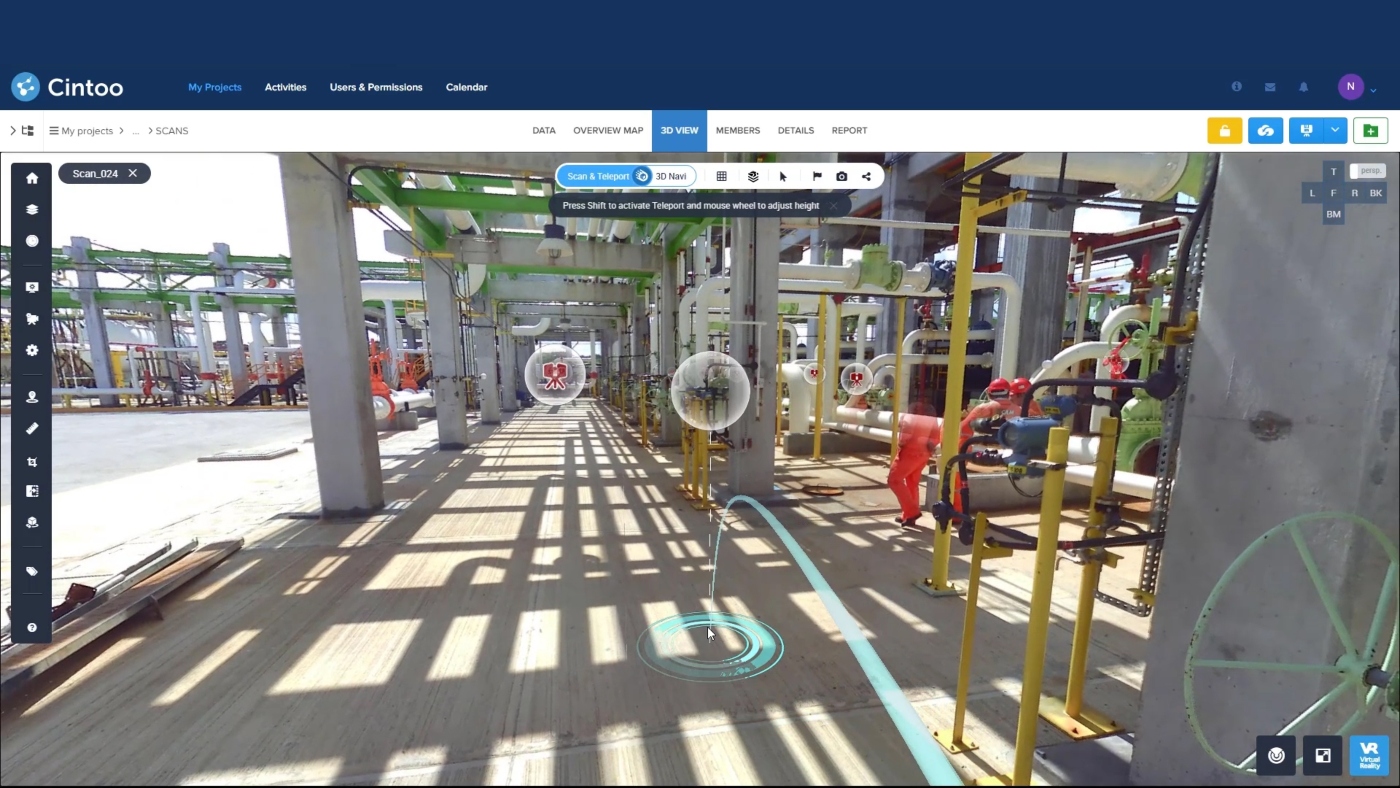
Als het aankomt op het interpreteren van de gegevens, zijn camera's geen partij voor de laserstraal. Neem bijvoorbeeld een ketelhuis, dat meestal donker is. Er is een grens aan wat de camera kan vastleggen met zijn RGB-sensor en daarom is wat duidelijk geïdentificeerd kan worden als beelden vaak onder- of overbelicht. Een laserstraal daarentegen legt altijd de werkelijke geometrie van de ruimte vast, waardoor dingen zichtbaar worden die een camera waarschijnlijk zou hebben gemist.
Cintoo Cloud biedt de duidelijkheid die nodig is om uw as-built gegevens nauwkeurig te beoordelen. Door de hoge-resolutie mesh in de webviewer van Cintoo Cloud te streamen, kunt u details in uw laserscandata zien die u normaal gesproken niet zou kunnen zien in een standaard point cloud viewer. Zo kunt u bijvoorbeeld schade aan een oppervlak of leidingen in een donkere nis herkennen.
See-door agrootheid
Puntwolken zijn van nature dubbelzinnig, waardoor je door de punten heen kunt kijken, of dat nu muren, ramen of plafonds zijn. Als je met puntenwolken werkt, kun je een punt kiezen dat in werkelijkheid enkele meters achter ligt op de plek waar je denkt te kijken. Cintoo's hoge-resolutie surface mesh lost dit probleem op door elke dubbelzinnigheid te verwijderen zodat je elk oppervlak tot in het kleinste detail kunt bekijken.
Als je problemen met puntenwolken tot het verleden wilt laten behoren, kun je Cintoo Cloud hier 30 dagen gratis uitproberen: www.cintoo.com. Of neem contact met ons op via e-mail sales@cintoo.com om te bespreken hoe Cintoo Cloud kan helpen bij het oplossen van jouw unieke uitdagingen.