건물의 준공 데이터를 캡처할 때 지상 레이저 기반 포인트 클라우드가 제공하는 탁월한 정확성과 결정성에도 불구하고, 포인트 클라우드 데이터는 방대한 경향이 있고, 어두운 공간이나 과다 노출된 영역에서 일어나는 일을 정확히 해석하기 어려울 수 있으며, 공간에 3D 점이 너무 많기 때문에 올바른 점을 선택하기가 쉽지 않은 반면 반대로 보고자 하는 대상 이외의 것에 집중하기 쉽다는 세 가지 주요 문제가 남아 있습니다.
이 세 가지 과제가 바로 신투가 설립된 이유이며, 이러한 문제를 해결하기 위해 고해상도 3D 메시 기반 포인트 클라우드 데이터를 만든 이유이기도 합니다.
크기
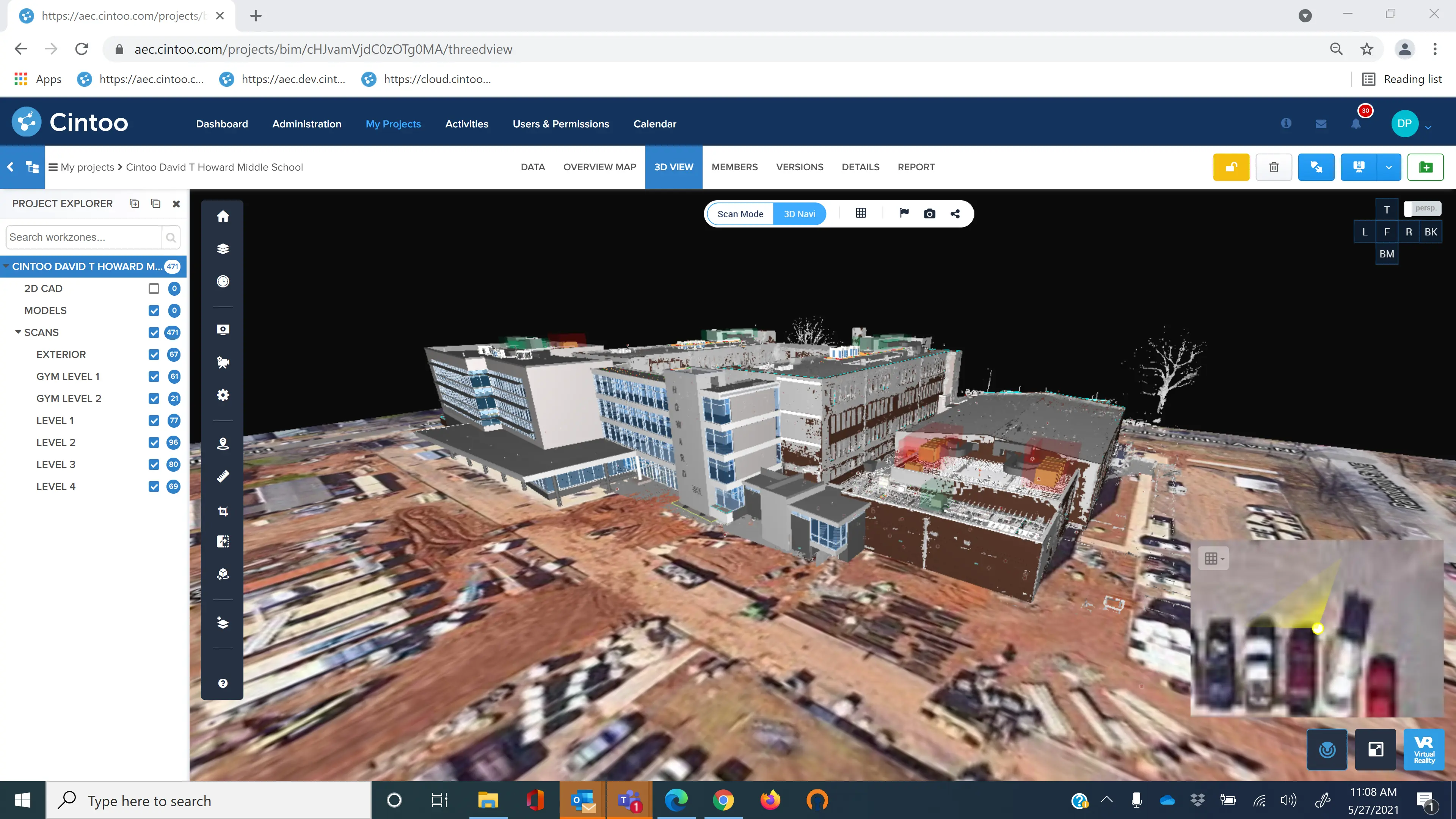
레이저 스캐닝은 정확한 포인트 클라우드를 제공하고 특히 실내 캡처의 경우 사진 측량보다 훨씬 더 신뢰할 수 있기 때문에 준공 시 데이터를 캡처하는 방법으로 널리 채택되었습니다. 그러나 이러한 포인트 클라우드 데이터의 일반적인 문제는 그 크기가 방대하여 데스크톱 중심적인 경향이 있다는 것입니다. 데이터 공유는 전통적으로 하드 디스크를 통해 이루어졌으며, 지금까지는 이러한 빅 데이터를 시각화, 공유 또는 배포를 위해 클라우드에 업로드하는 것이 매우 어려운 일이었습니다.
Cintoo Cloud 는 포인트 클라우드를 3D 표면 메시로 바꾸고 데이터를 압축하여 정확도와 프로젝트 구조를 유지하면서 원래 크기보다 10~20배 작게 만들어 이 모든 것을 변화시켰습니다. 크기가 작아지고 관리하기 쉬워진 데이터는 Cintoo의 보안 클라우드에 업로드하여 보고 공유할 수 있습니다. 또한 이렇게 압축된 데이터는 데스크톱 환경에서 다시 배포하기 위해 필요할 때 포인트 클라우드(E57, RCS 또는 RCP) 또는 통합 메시(OBJ, FBX 또는 STL)로 쉽게 다시 변환할 수 있습니다.
해석
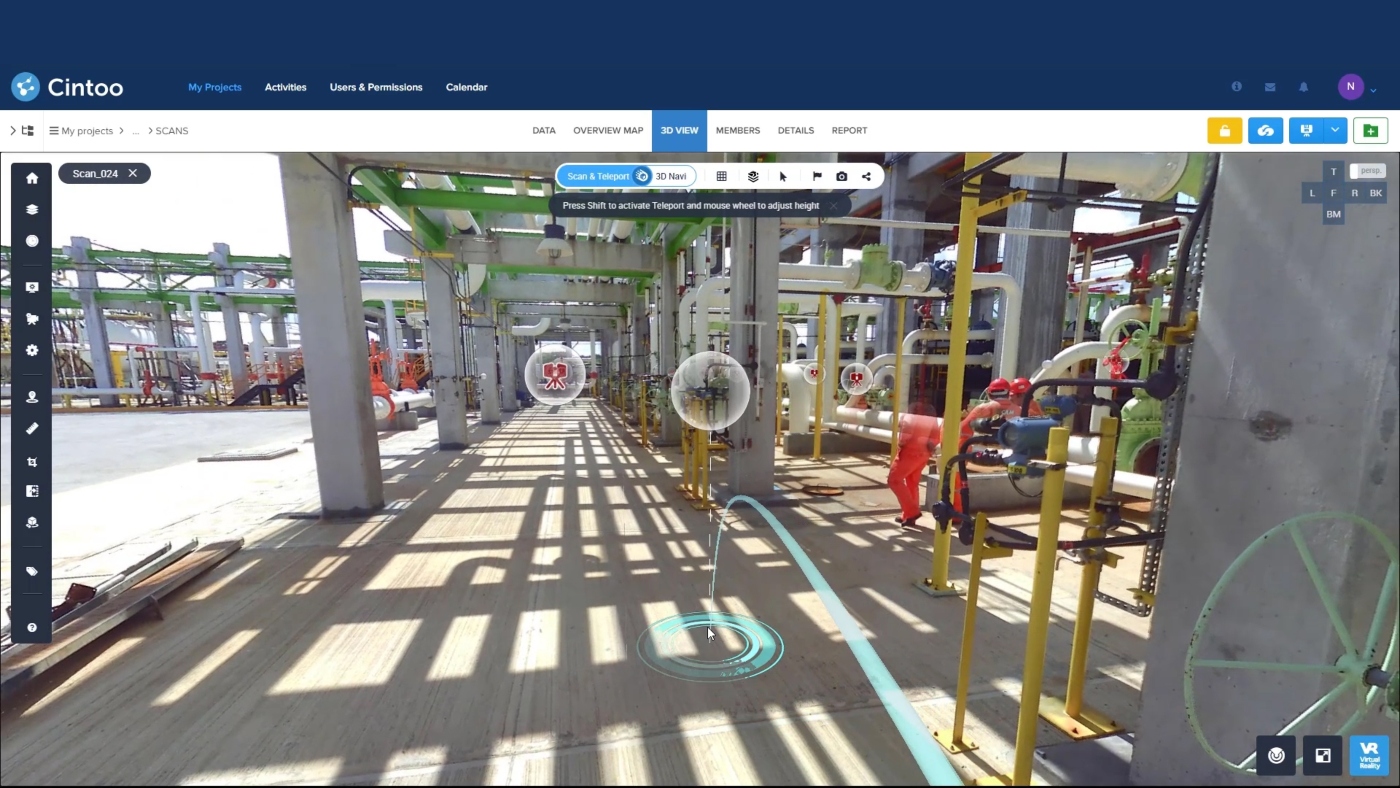
데이터를 해석하는 데 있어 카메라는 레이저 빔과 비교할 수 없습니다. 예를 들어 어두운 경향이 있는 보일러실을 생각해보세요. 카메라가 RGB 센서로 캡처할 수 있는 대상에는 한계가 있기 때문에 이미지가 노출 부족 또는 과다 노출되어 명확하게 식별할 수 없는 경우가 많습니다. 반면 레이저 빔은 항상 공간의 실제 형상을 캡처하여 카메라가 놓칠 수 있는 사물을 드러냅니다.
Cintoo Cloud 는 준공 데이터를 정확하게 평가하는 데 필요한 선명도를 제공합니다. Cintoo Cloud 의 웹 뷰어에서 고해상도 메시를 스트리밍하면 일반적으로 표준 포인트 클라우드 뷰어에서는 볼 수 없는 레이저 스캔 데이터의 세부 사항을 볼 수 있으며, 어두운 홈에 있는 표면이나 파이프의 손상도 인식할 수 있습니다.
See-through a모호성
포인트 클라우드는 본질적으로 모호하기 때문에 벽, 창문, 천장 등 점을 통해 볼 수 있습니다. 포인트 클라우드로 작업할 때 실제로 보고 있다고 생각하는 지점보다 몇 미터 뒤에 있는 지점을 선택할 수 있습니다. Cintoo의 고해상도 표면 메쉬는 모호함을 제거하여 이 문제를 해결하므로 모든 표면을 가장 세밀하게 볼 수 있습니다.
포인트 클라우드 문제를 과거의 일로 바꾸고 싶으시다면 여기에서 Cintoo Cloud 30일 무료 체험판을 사용해 보세요( www.cintoo.com). 또는 이메일 sales@cintoo.com 으로 문의하여 Cintoo Cloud 이 귀사의 고유한 문제를 해결하는 데 어떻게 도움이 될 수 있는지 상담해 주세요.