点群データは巨大になりがちで、暗い場所や露出の高い場所で何が起こっているかを正確に解釈するのは困難です。また、空間上に3Dドットが存在するため、正しいポイントを選ぶのは必ずしも容易ではなく、逆に、見るべきもの以外のものに目を向けてしまいがちです。
この3つの課題は、まさにCintooが設立された理由であり、それぞれの課題を解決するために、高解像度3Dメッシュベース点群データを作成したのです。
サイズ
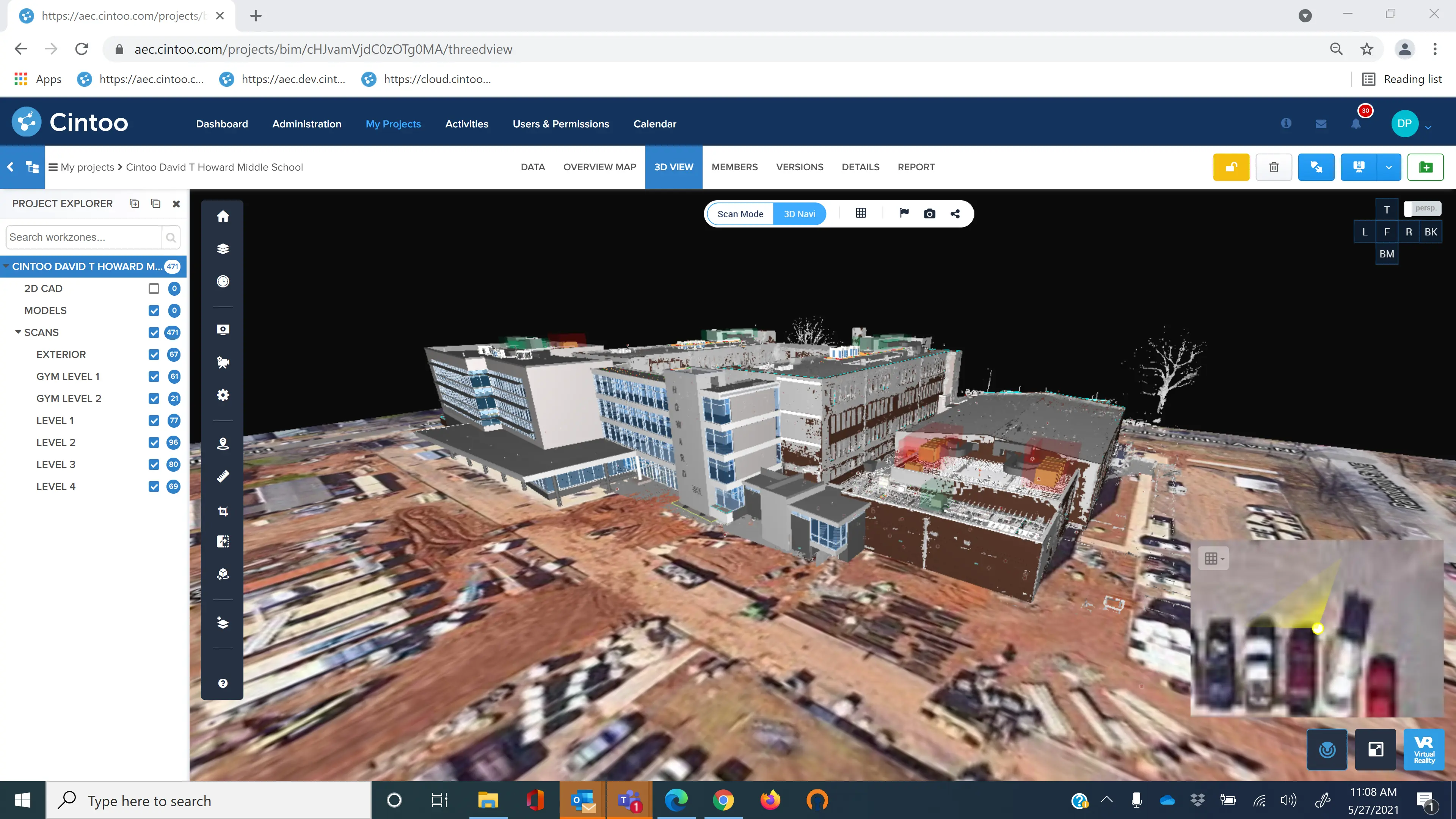
レーザースキャンは、正確な点群データを提供し、特に屋内の撮影では写真測量よりもはるかに信頼性が高いため、as-builtデータの取得方法として広く採用されるようになりました。しかし、この点群データは巨大であるため、デスクトップ中心になりがちなのが共通の問題点です。データの共有は従来、ハードディスクを介して行われており、これまで、このようなビッグデータをクラウドにアップロードして可視化、共有、配信することは本当に難しいことでした。
Cintoo Cloud は、点群データを3Dサーフェスメッシュに変換し、正確さとプロジェクト構造を維持したまま、元のサイズより10倍から20倍小さくなるように圧縮することで、こうした状況を一変させた。より小さく、より管理しやすくなったデータは、Cintooの安全なクラウドにアップロードすることができ、そこで閲覧・共有することができる。さらに、この圧縮されたデータは、必要なときに点群(E57、RCS、RCP)や統合メッシュ(OBJ、FBX、STL)に簡単に変換して、デスクトップの世界に戻って配布することができます。
インタープリテーション
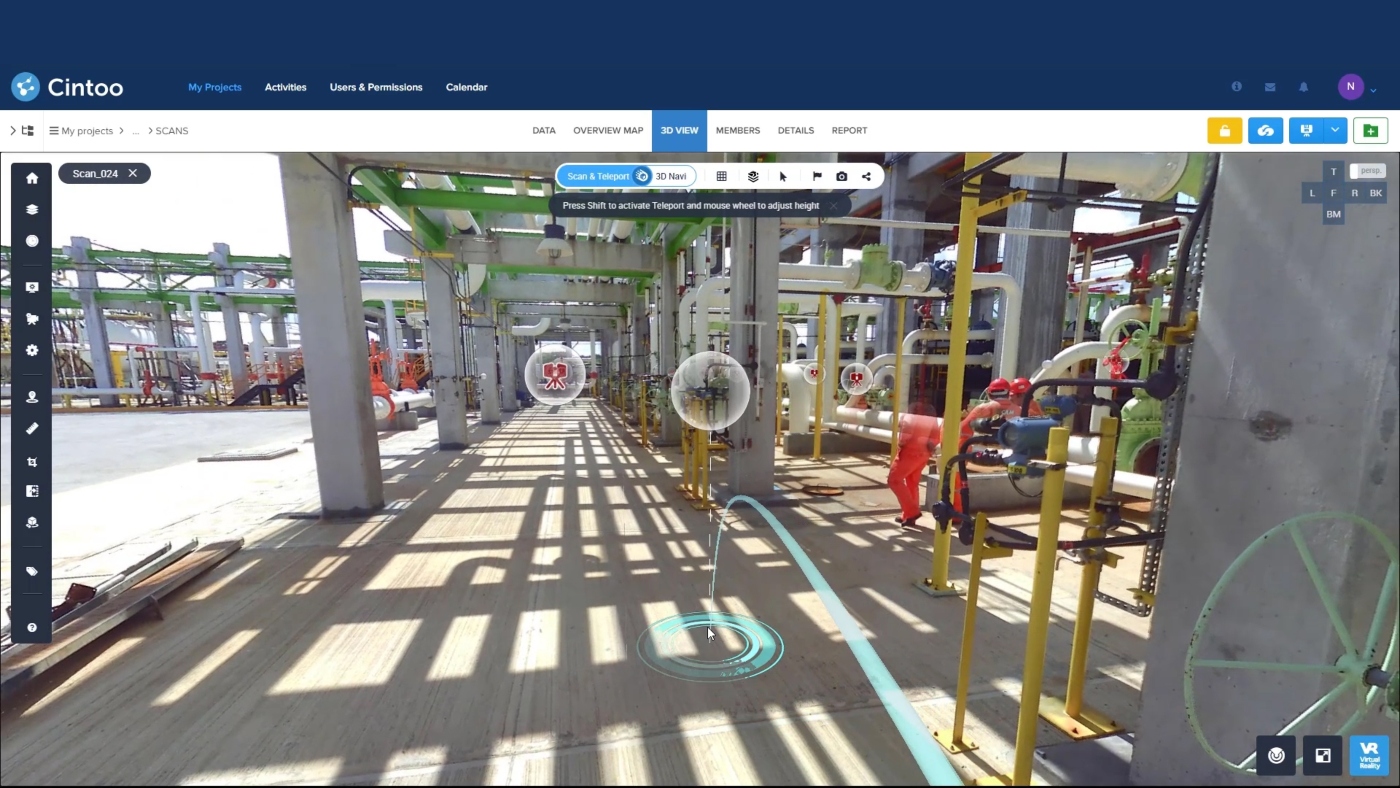
データを読み解くという点では、カメラはレーザービームに敵いません。例えば、暗くなりがちなボイラー室。カメラのRGBセンサーで撮影できる範囲には限界があり、画像として明確に認識できるものは露出が不足したり過剰になったりすることがよくあります。しかし、レーザー光線は常に空間の形状を捉えているため、カメラでは見逃してしまいそうなことも明らかになります。
Cintoo Cloud は、as-builtデータを正確に評価するために必要な鮮明さを提供します。Cintoo Cloudのウェブビューアで高解像度メッシュをストリーミングすることで、標準的な点群ビューアでは通常見ることができないレーザースキャンデータの詳細を見ることができ、表面の損傷や暗い凹部のパイプを認識することができます。
Sイー・スルー a多義性
点群というのはその性質上、曖昧なものであり、壁や窓、天井など、点を透かして見ることができる。点群を使って作業していると、自分が見ているつもりでも、実際には数メートル後方にある点を選んでしまうことがあります。Cintooの高解像度サーフェスメッシュは、曖昧さを取り除くことでこの問題を解決し、すべてのサーフェスを細部まで見ることができます。
点群の問題を過去のものにしたいとお考えの方は、Cintoo Cloud を30日間無料でお試しいただけます。www.cintoo.com。また、sales@cintoo.comまでご連絡いただければ、Cintoo Cloud がお客様のユニークな課題の解決にどのように役立つかをご説明いたします。