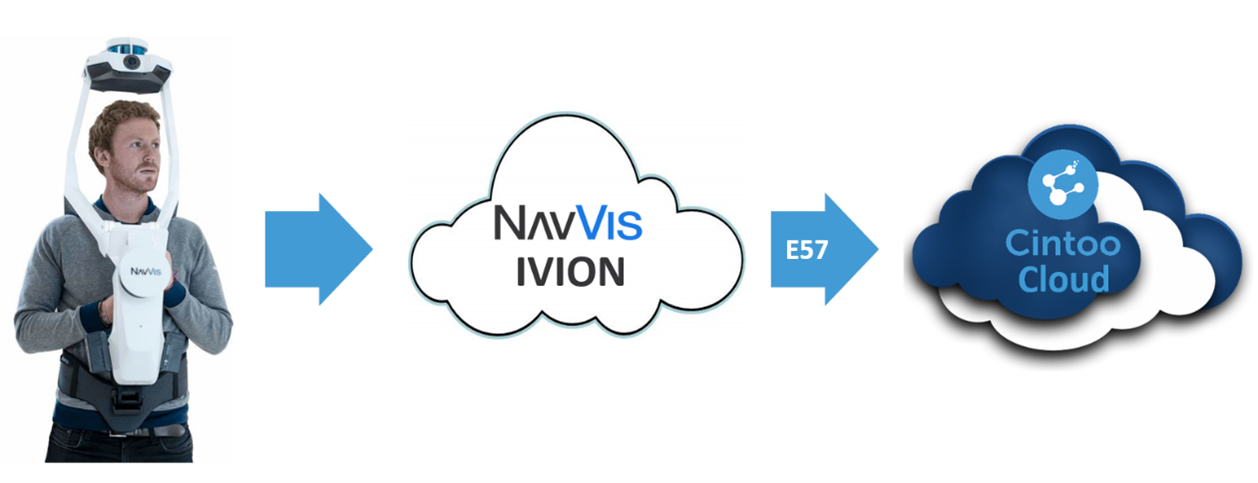
Cintoo는 IVION™과 Cintoo Cloud 간의 내보내기/가져오기 워크플로우를 간소화하는 NavVis IVION™ E57 내보내기를 통해 NavVis VLX™ 및 M6™ 데이터를 완벽하게 지원하게 된 것을 기쁘게 발표합니다. IVION™ 플랫폼에서 다운로드할 수 있는 E57 파일에는 Cintoo Cloud가 이 현실 데이터를 쉽게 압축 및 가져와 TurboMesh™로 구동되는 Cintoo의 호평받는 메시 기반 뷰어를 사용하여 표시하는 데 필요한 모든 데이터(포인트 클라우드, 궤적, 파노라마 이미지)가 포함되어 있습니다.
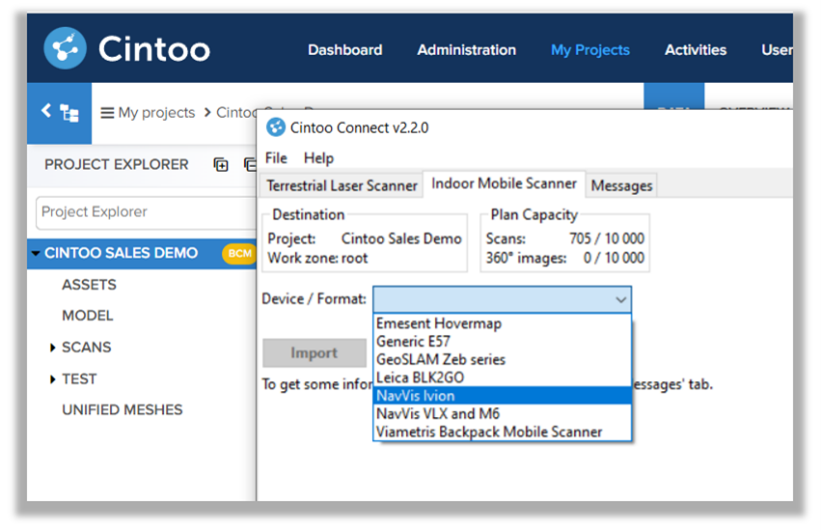
IVION™에서 E57을 가져올 때 사용자는 카메라 경로를 따라 파노라마 이미지의 샘플링을 선택하고 마치 정적 스캐너에서 데이터를 가져오는 것처럼 선택한 각 파노라마를 구조화된 스캔 위치로 전환할 수 있습니다. '재구조화'라고 하는 이 프로세스는 소스 포인트 클라우드의 정확도나 밀도를 손상시키지 않으며 스캐닝 장치에서 캡처한 소스 파노라마 이미지를 사용합니다. Cintoo의 고유한 포인트 클라우드-메시 기술을 활용하는 Cintoo Cloud는 모든 레이저 스캔 데이터를 3D 표면(또는 메시)으로 변환하여 전문가와 비전문가 모두 쉽게 탐색하고 해석할 수 있도록 합니다.
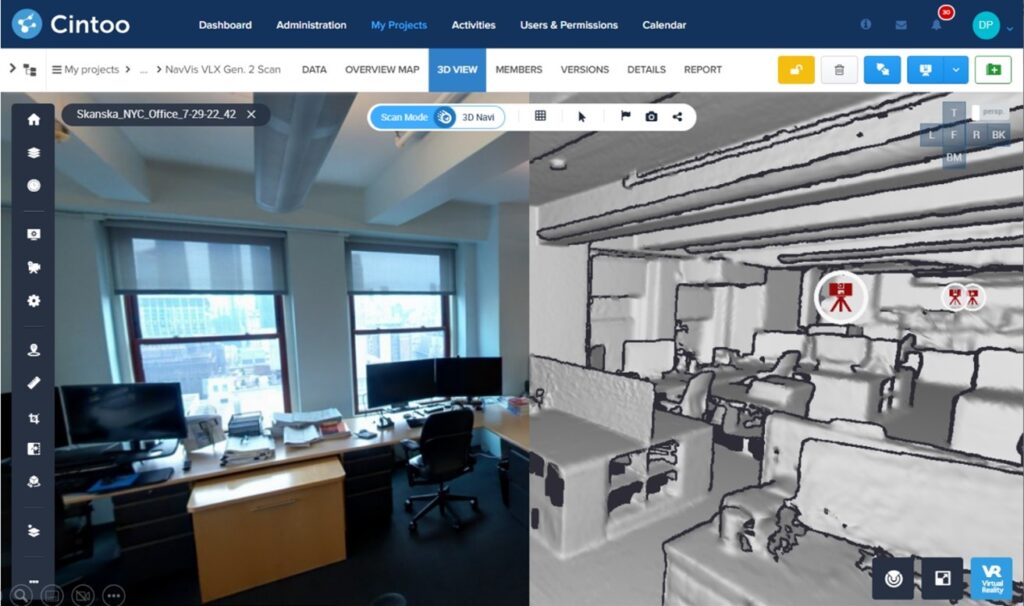
스캔 데이터가 Cintoo 클라우드에 저장되면 사용자는 NavVis IVION™의 보기 및 탐색 기능을 보완하는 몇 가지 유용한 워크플로우를 활용할 수 있습니다. Cintoo는 하나의 디지털 공간에서 다른 데이터와 결합할 수 있도록 지원하여 NavVis 스캔 데이터에 힘을 더합니다:
- 하드웨어 공급업체에 관계없이 다양한 스캔 소스(정적 스캐너, 실내 모바일 스캐너, 라이다 기반 드론 스캐너 등)의 데이터를 단일 프로젝트로 병합하는 데 Cintoo Cloud를 사용할 수 있습니다.
- Cintoo Cloud는 BIM 또는 CAD 모델을 가져와 스캔 데이터와 비교하는 데에도 사용할 수 있습니다. 스캔-BIM/CAD 비교 도구는 스캔의 준공 상태와 설계된 2D 또는 3D 모델 간의 차이점을 표시합니다. 그런 다음 이러한 차이점을 '이슈'로 문서화하고 기본 이슈 관리 플랫폼을 사용하여 모델 조정 워크플로에서 사용할 수 있습니다.
- Cintoo Cloud를 자산 관리, IoT 및 디지털 트윈 에코시스템에 통합하여 태그가 부착된 장비나 기계를 준공된 상태로 표시하고 문서화하여 자산 상태에 대한 컨텍스트를 제공할 수 있습니다.
- 모든 스캐너에서 생성된 스캔 데이터는 스캔-BIM 모델링 워크플로우를 위해 정형 또는 비정형 포인트 클라우드로 내보내고 공유하거나 데스크톱 앱에서 충돌 감지를 위해 통합 3D 메시로 변환할 수 있습니다.
Cintoo Cloud는 하드웨어에 구애받지 않는 스캔 및 3D 모델 플랫폼으로, BIM 및 디지털 트윈 워크플로우를 지원하고 메시 기반 현실 캡처 데이터를 산업용 메타버스 경험에 사용할 수 있도록 지원합니다.


