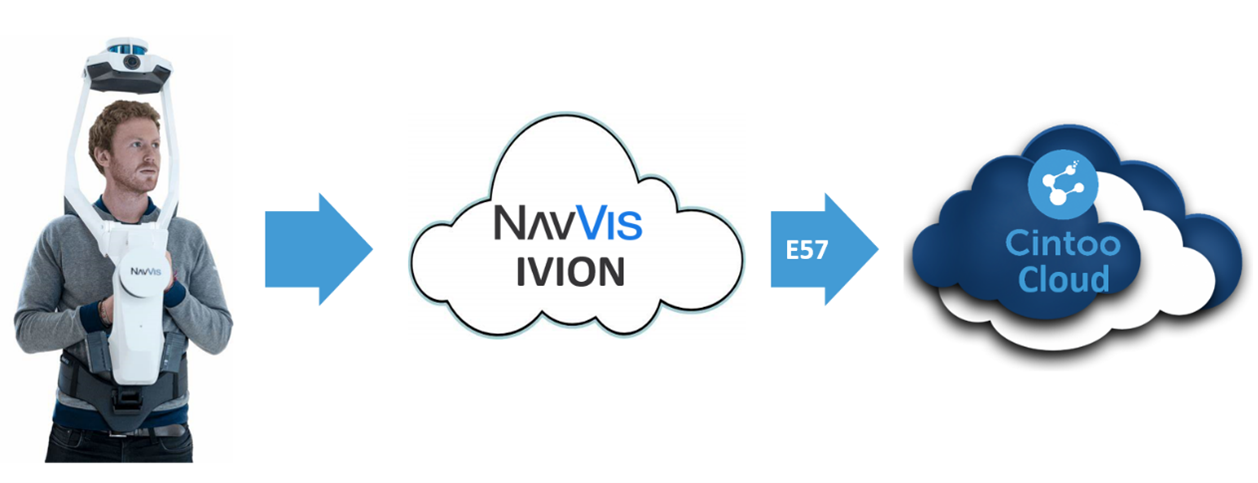
CintooはIVION™とCintoo Cloud間のエクスポート/インポートワークフローを効率化するNavVis IVION™ E57エクスポートによるNavVis VLX™とM6™データの完全サポートを発表します。IVION™プラットフォームからダウンロード可能なE57ファイルには、Cintoo Cloudがこのリアリティデータを簡単に圧縮してインポートし、TurboMesh™を搭載したCintooの定評あるメッシュベースビューアを使用して表示するために必要なすべてのデータ(点群、軌跡、パノラマ画像)が含まれています。
.webp?width=745&height=481&name=Picture2%20(1).webp) Cintooコネクト2.2.xを使用してNavVis IVION E57をインポートする
。
Cintooコネクト2.2.xを使用してNavVis IVION E57をインポートする
。
IVION™からE57をインポートする際、ユーザーはカメラパスに沿ってパノラマ画像のサンプリングを選択し、選択した各パノラマを構造化されたスキャン位置に変えることができます。リストラクチャリング」と呼ばれるこのプロセスは、ソース点群の精度や密度を損なうことなく、スキャニングデバイスによってキャプチャされたソースパノラマ画像を使用します。CintooクラウドはCintoo独自の点群からメッシュへの変換技術を活用し、レーザースキャンデータを3Dサーフェス(メッシュ)に変換します。
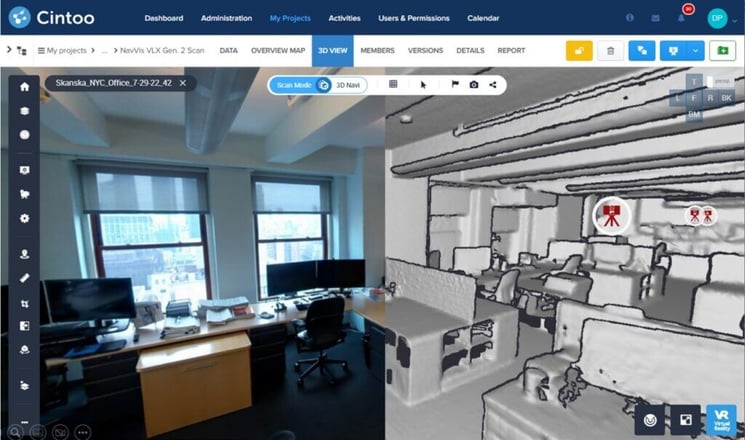 Cintooクラウドで変換されたレーザースキャンデータ
。
Cintooクラウドで変換されたレーザースキャンデータ
。
スキャンデータがCintoo Cloudに入ると、NavVis IVION™の表示とナビゲーション機能を補完するいくつかの便利なワークフローを利用することができます。Cintooは、NavVisスキャンデータを他のデータと組み合わせて1つのデジタルな場所に置くことを可能にすることで、NavVisスキャンデータにパワーを与えます。
- Cintooクラウドは様々なスキャンソース(スタティックスキャナー、インドアモバイルスキャナー、Lidarベースのドローンスキャナーなど)のデータをハードウェアベンダーに関係なく一つのプロジェクトに統合することができます。
- Cintoo CloudはBIMまたはCADモデルをインポートし、スキャンデータと比較するためにも使用できます。スキャン-BIM/CAD比較ツールは、スキャンされた現状と設計された2Dまたは3Dモデルとの違いを表示します。そのような違いは「問題」として文書化し、既定の問題管理プラットフォームを使用してモデル調整のワークフローで使用することができます。
- Cintooクラウドを資産管理、IoT、デジタルツインのエコシステムに統合することで、タグ付けされた設備や機械を構築時の状態で表示し、文書化することができます。
- あらゆるスキャナーで生成されたスキャンデータは、スキャンからBIMモデリングワークフロー用の構造化または非構造化点群としてエクスポートして共有したり、デスクトップアプリで衝突検出用の統合3Dメッシュに変換したりできます
Cintooクラウドは、BIMとデジタルツインワークフローを可能にし、メッシュベースのリアリティキャプチャデータを産業用メタバース体験に対応させる、ハードウェアにとらわれないスキャンと3Dモデルのプラットフォームです。