Cintoo Cloud, the complementary platform to NavVis IVION™ for your BIM and Digital Twin workflows
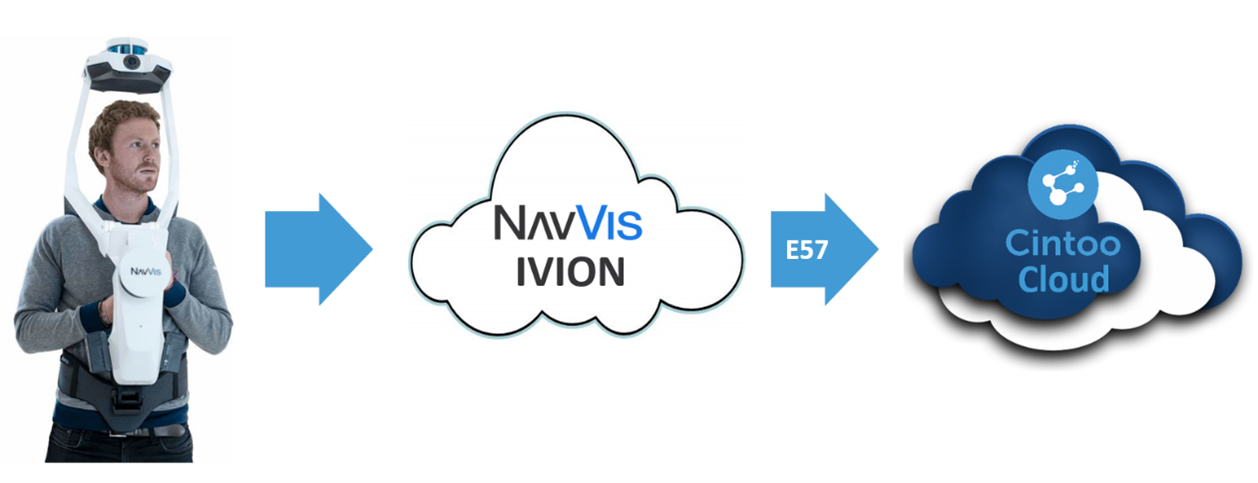
Cintoo is pleased to announce the full support of NavVis VLX™ and M6™ data via the NavVis IVION™ E57 export that streamlines the export/import workflow between IVION™ and Cintoo Cloud. The E57 file that is downloadable from the IVION™ platform contains all necessary data (point cloud, trajectory, panoramic images) for Cintoo Cloud to easily compress and import this reality data and display it using Cintoo’s acclaimed mesh-based viewer powered by TurboMesh™.
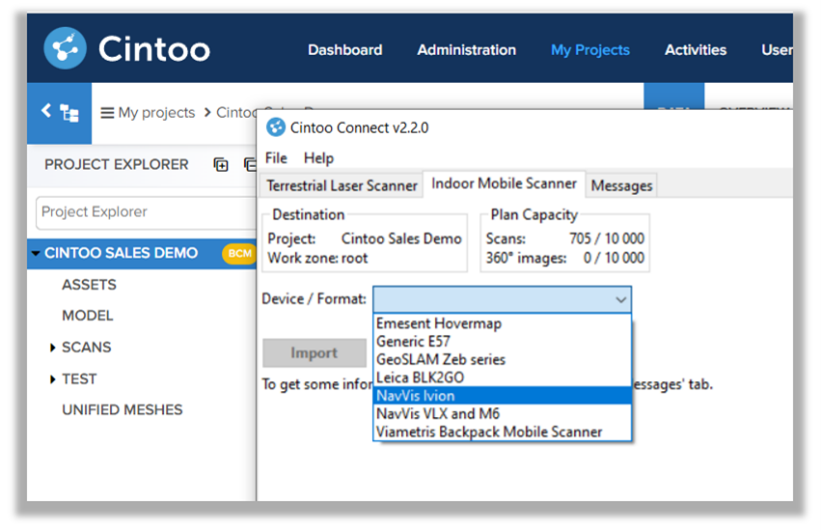
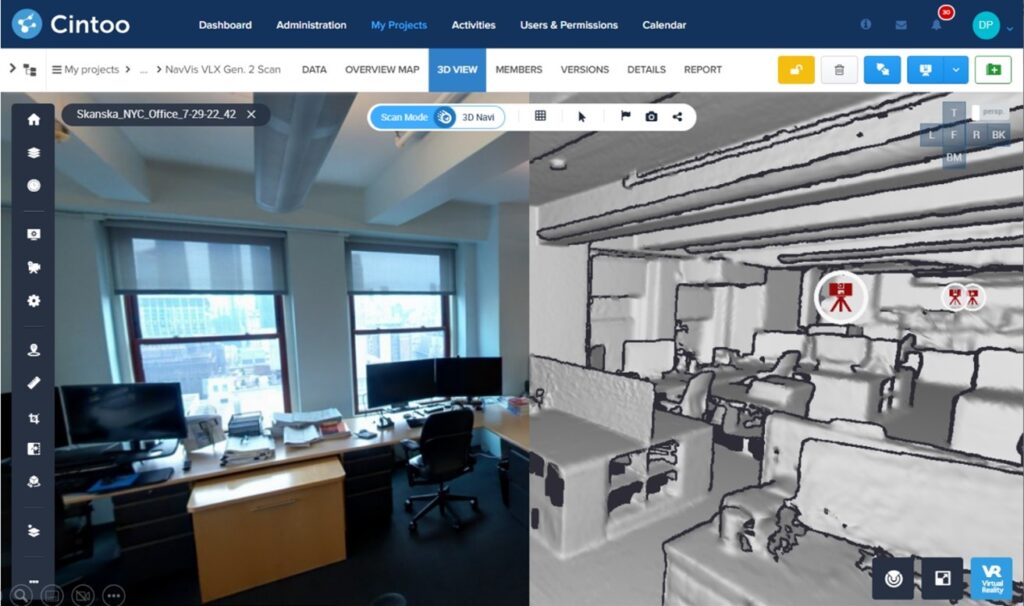
When importing the E57 from IVION™, users can select the sampling of the panoramic images along the camera path and turn each selected panorama into a structured scan position, just as if the data was coming from a static scanner. This process, known as ‘restructuring’, doesn’t compromise the source point cloud accuracy or density and uses the source panoramic images captured by the scanning device. Leveraging Cintoo’s unique point cloud-to-mesh technology, Cintoo Cloud converts all of your laser scan data into 3D surfaces (or mesh) for easy navigation and interpretation by expert and non-experts alike.
Once the scan data is in Cintoo Cloud, users can benefit from several helpful workflows that complement NavVis IVION™’s viewing and navigation features. Cintoo adds power to your NavVis scan data by enabling it to be combined with other data in one digital place:
- Cintoo Cloud can be used to merge data from various scan sources (static scanners, indoor mobile scanners, Lidar-based drone scanners as well) into a single project regardless of the hardware vendor.
- Cintoo Cloud can also be used to import your BIM or CAD models and compare them with the scan data. The scan-BIM/CAD comparison tools display differences between the as-built conditions in the scans and your as-designed 2D or 3D model. Such differences can then be documented as ‘issues’ and used in your model coordination workflows using your default issue management platform.
- Cintoo Cloud can be integrated into your asset management, IoT and Digital Twin ecosystems to display and document your tagged equipment or machinery in their as-built conditions, thus providing the context about the condition of your asset.
- The scan data produced by any scanner can be exported and shared as structured or unstructured point clouds for scan-to-BIM modeling workflows or turned into unified 3D meshes for clash detection in desktop apps.
Cintoo Cloud is your hardware-agnostic scan and 3D model platform to enable your BIM and Digital Twin workflows, and to make your mesh-based reality capture data ready for industrial Metaverse experiences.


